- +1
人形机器人创新中心,如何创新?

作者 | 山竹
出品 | 锌产业(公众号:xinchanye2021)
“据我们不完全统计,人形机器人本体企业已经突破百家,产业链核心零部件企业已经有千余家……”
在昨天(4月9日)的首届中国人形机器人产业大会上,立德机器人平台CEO潘月如是说。
实际上,自特斯拉官宣造人形机器人、OpenAI的ChatGPT发布后的过去这一年里,仅仅是人形机器人核心零部件之一的谐波减速器相关项目,国内就涌现出了40多个。
人形机器人热度空前溢于言表。
空前热度背后有着多方面原因,锌产业此前文章我们做过一些解释,这里不再过多赘述。
值得注意的是,这样的热度,让人形机器人成了又一个“政产学研用”融合推进的先锋产业。
由此,北京、上海、深圳、浙江等地相继涌现出了人形机器人创新中心,这其中,尤以北京最为迅速,影响力也最大。
这些人形机器人创新中心意义何在、作用几何、如何运作……
在昨天的大会上,熊友军首次以北京人形机器人创新中心有限公司总经理的身份现身行业会议,做了《北京人形机器人创新中心发展思考》的演讲。
关于人形机器人创新中心的这些问题,以及北京人形机器人创新中心的庐山真面目,也在这次大会上正式揭开。
01 对标谷歌、特斯拉,做行业研发组织者
在北京经信局支持下,北京人形机器人创新中心在2023年11月2日成立,股东单位包括四个,分别是京城机电、小米机器人、优必选科技、亦庄机器人。
目前,创新中心有两大定位:
第一,人形机器人核心技术研发者。
该创新中心主要聚焦人形机器人共性、关键的核心技术,进行攻坚和研发。
值得注意的是,据熊友军介绍称,北京人形机器人创新中心研发的这些技术,最终会面向行业开放应用。
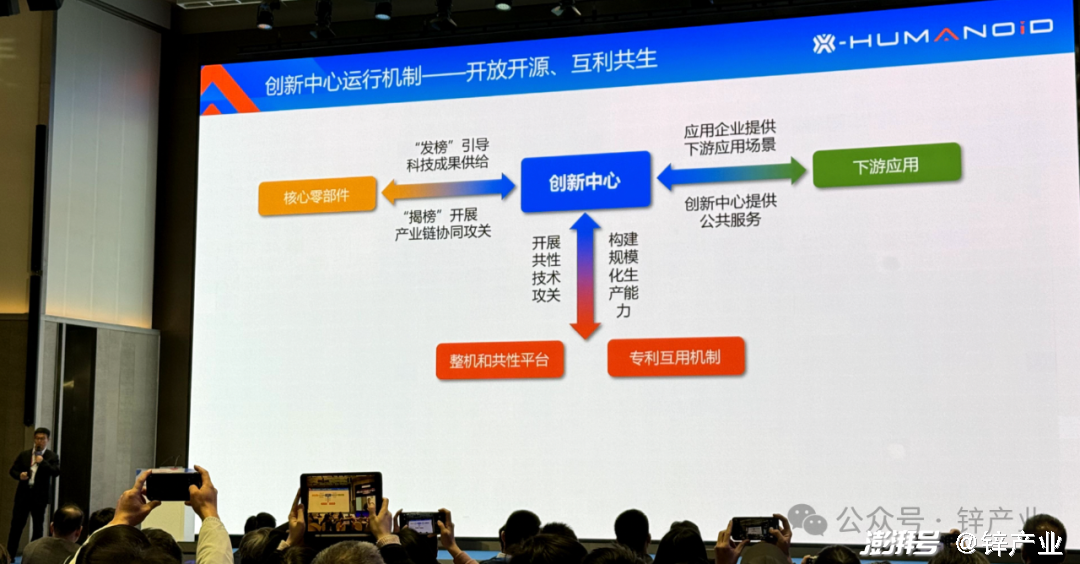
第二,人形机器人生态建设者。
人形机器人创新中心向下由应用企业提供下游应用场景并提出应用需求,创新中心将这些需求提炼出来,通过“揭榜挂帅”形式联合上游核心零部件厂商进行技术攻关,形成一个开源产业生态。
在这样的定位下,在今年1月,北京人形机器人创新中心还组建了一支阵容超级豪华的专家委员会。
该专家委员会由乔红院士担任主任、朱松纯、黄铁军、魏然任副主任,黄强、孙富春、赵杰等9位国内知名学者专家任委员。

而北京人形机器人创新中心的战略规划,正是由这样一支专家团队来共同打造。
这样的人形机器人创新中心,有两个目标:
第一,成为人形机器人技术引领者。
第一,成为人形机器人行业研发组织者。
北京人形机器人创新中心对标的是谷歌、特斯拉这样无论在科研资金、社会资源,还是研发团队都相当庞大的国际巨头的科研团队。

为此,该创新中心正在规划组建一个400+人的专职人形机器人研发队伍,这支队伍将专注在10+领域的人形机器人通用本体技术研发,并会与行业头部公司建立20+联合实验室。
为了支持这一创新中心发展,北京市将会为该创新中心提供了1000+P算力,机器人实验平台200+台,实验仪器设备100+套,实验测试场地2000+㎡。
02 创新中心的“四年规划”
调动这么多资源、投入如此巨资打造的创新中心,如今已经制定了明确的研发目标。
总体来说,是要打造软硬两个母平台:
通用人形机器人“硬件母平台”和大模型+开源运控系统“软件母平台”。
由这两个母平台,最终来支撑面向不同应用领域的人形机器人本体研发。
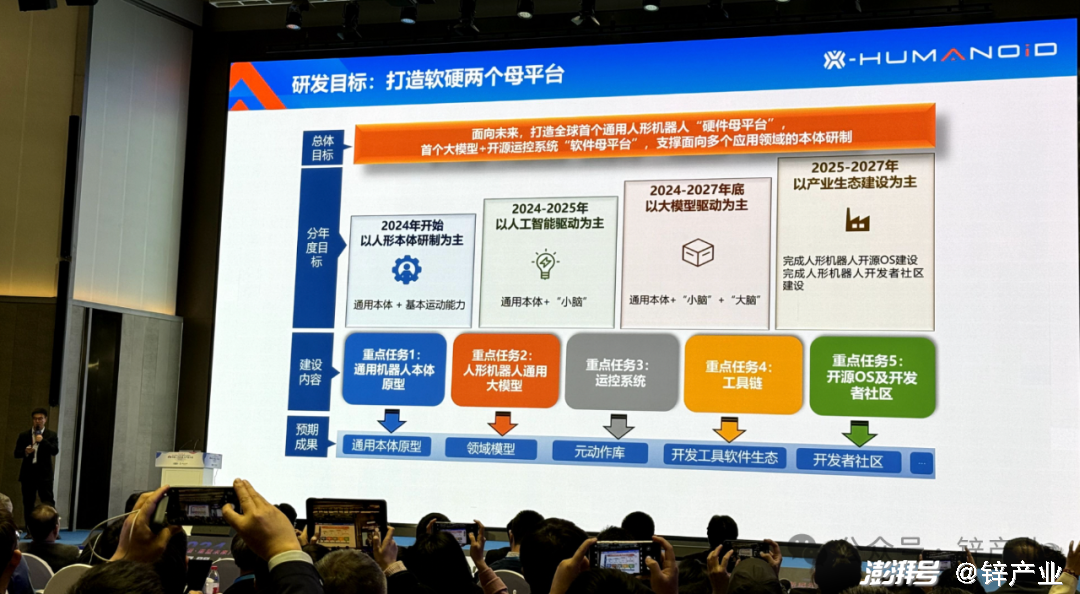
具体来看,这两个终极目标,在未来这四年里,又被切分为五个重点任务分四步来落实:
2024年开始,以人形机器人本体研制为主,搭建人形机器人通用本体原型,实现通用本体+基本运动控制能力;
2024-2025年,以人工智能驱动为主,研发人形机器人通用大模型,搭建领域模型,实现「通用本体+小脑」;
2024-2027年底,以大模型驱动为主,与生态合作伙伴共创开源工具链,搭建开源工具软件生态,实现「通用本体+小脑+大脑」;
2025-2027年,以产业生态建设为主,打造开源OS和开发者社区,完成人形机器人开源OS建设及开源社区搭建。
不难发现,这样的发展思路,其实正是遵从了工信部在2023年10月印发的《人形机器人创新发展指导意见》。
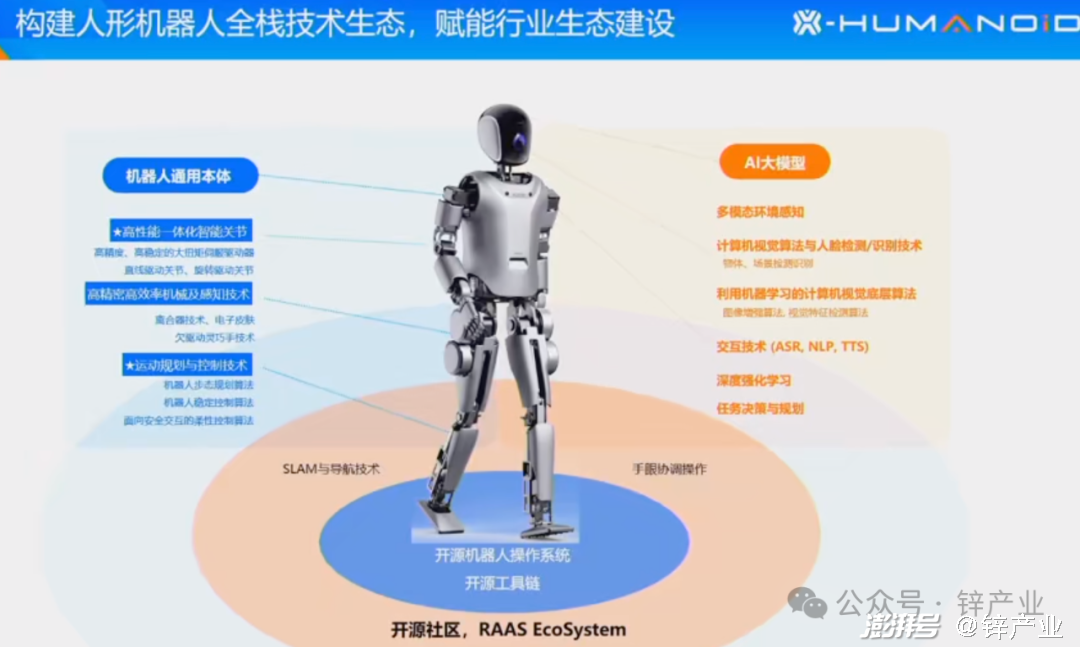
通过这样一个四年计划,北京人形机器人创新中心最终是希望可以构建人形机器人全栈技术生态,并通过这样的全栈技术生态赋能行业生态建设。
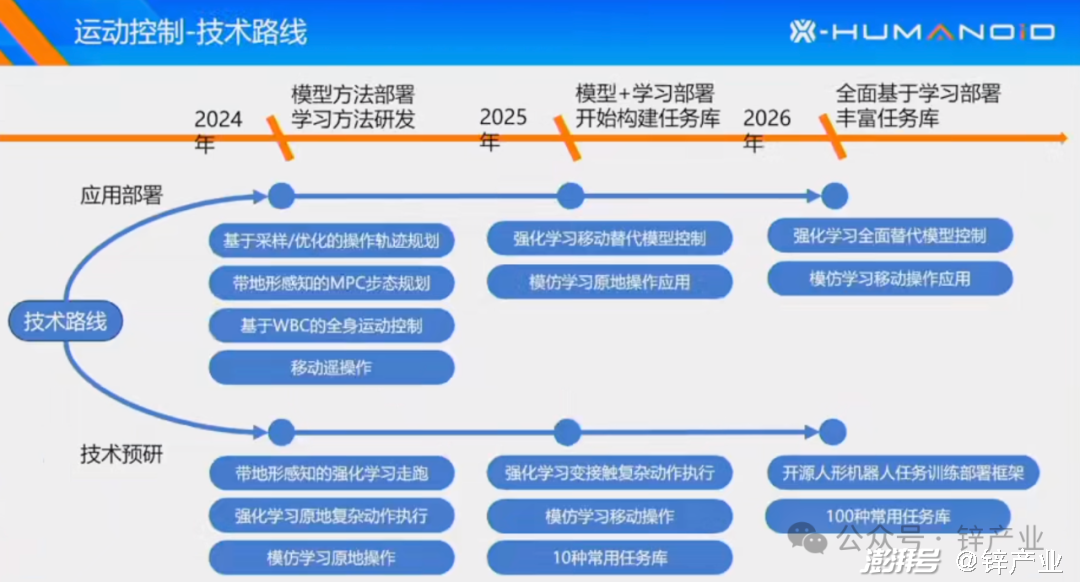
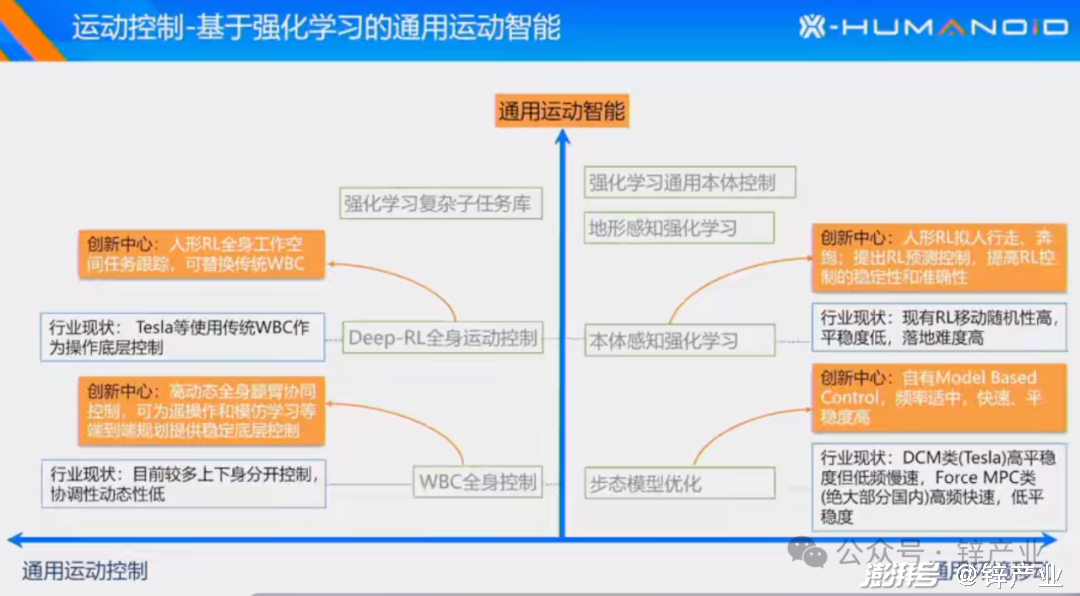
具体到运动控制方面,创新中心是要搭建人形机器人通用本体和大模型之间的桥梁,为具身智能大模型提供任务级接口。
围绕通用运动智能,创新中心从通用运动控制和通用环境移动两个领域规划了「强化学习通用本体控制」、「强化学习复杂子任务库」、「地形感知强化学习」、「Deep-RL全身运动控制」、「本体感知强化学习」、「WBC全身控制」、「步态模型优化」七大任务方向。
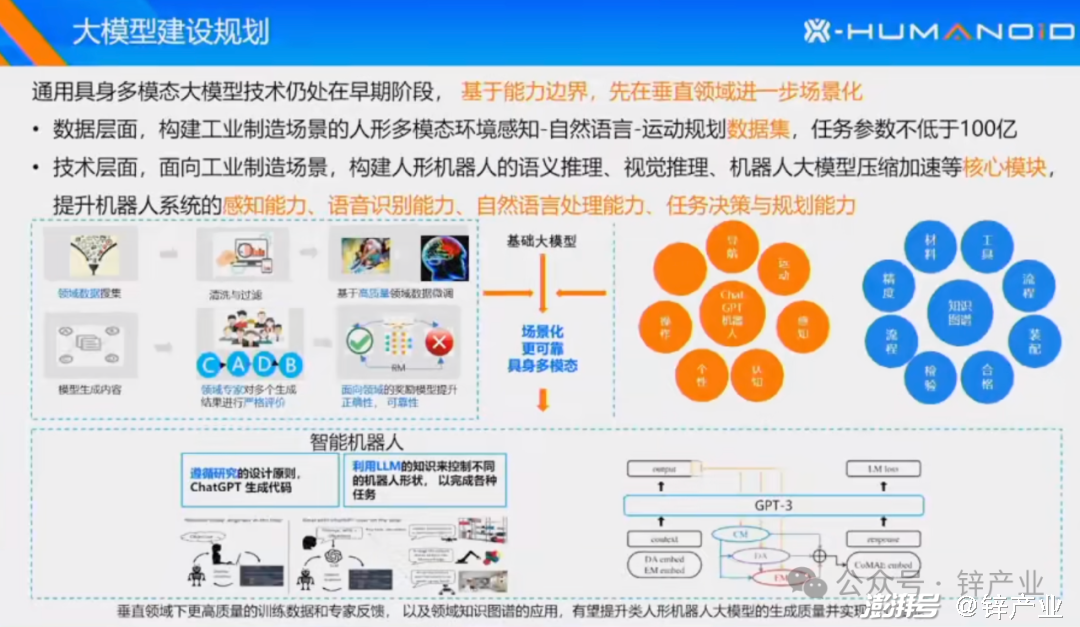
在大模型方面,由于现在通用具身多模态大模型技术依然处于早期阶段,创新中心现在会基于具身多模态大模型的能力边界,先在垂直领域做进一步场景化。
例如,在数据层面,构建工业制造场景的人形多模态「环境感知-自然语言-运动规划」数据收集平台和数据集,任务参数不低于100亿;
在技术层面,面向工业制造场景,构建人形机器人的「语义推理」、「视觉推理」、「机器人大模型压缩和加速」等核心模块,提升机器人系统的感知能力、语音识别能力、自然语言处理能力、任务决策和规划能力。
这其中,具身多模态大模型,又是一项颇具挑战的任务和工作。
03 具身大模型,又该怎么做?
当下,针对人形机器人具身多模态大模型的研究,行业普遍认为应该通过云端大模型做决策控制,端侧小模型做具体执行操作来实现具身智能。
这其中,数据是关键,数据收集和数据融合又是两大行业难题。
在创新中心的规划中,针对数据收集会先行构建一个数据生成集成平台。
借助大模型的文本、图像等生成能力,以多智能体协作的方式,在世界知识迁移的基础上,通过虚实结合方式,构建跨模态融合数据生成体系。
在这个过程中,创新中心会研究机器人领域「任务-本体-环境」数据生成方法,建设机器人数据生成平台。

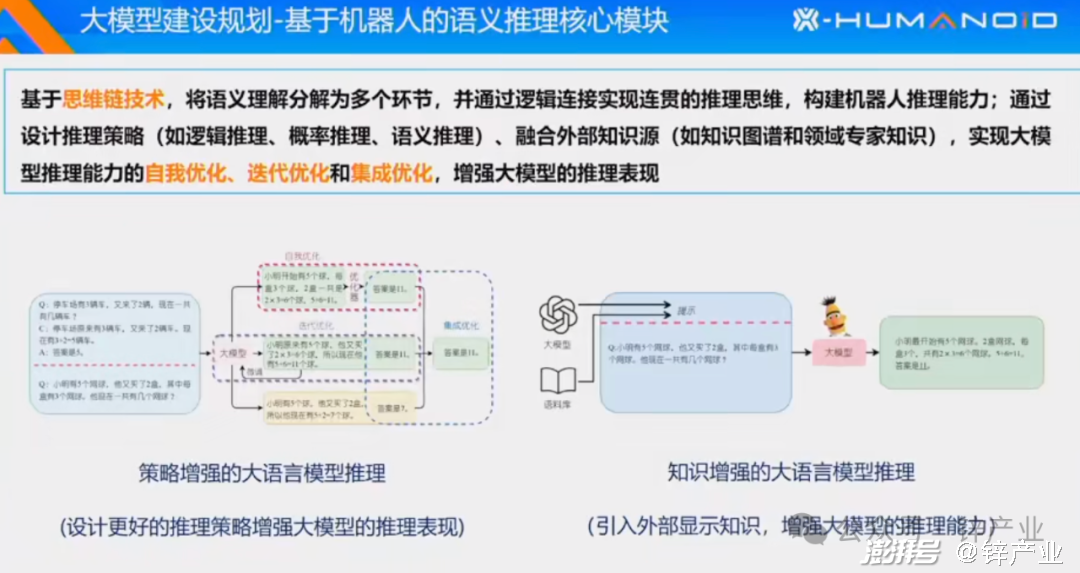
在机器人语音推理核心模块构建方面,创新中心会基于思维链技术,将语义理解分为多个环节,并通过逻辑连接实现连贯的推理思维,构建机器人推理能力。
通过设计推理策略(如逻辑推理、概率推理、语义推理)、融合外部知识源(如知识图谱和领域专家知识),实现大模型推理能力的自我优化、迭代优化和集成优化,增强大模型的推理表现。
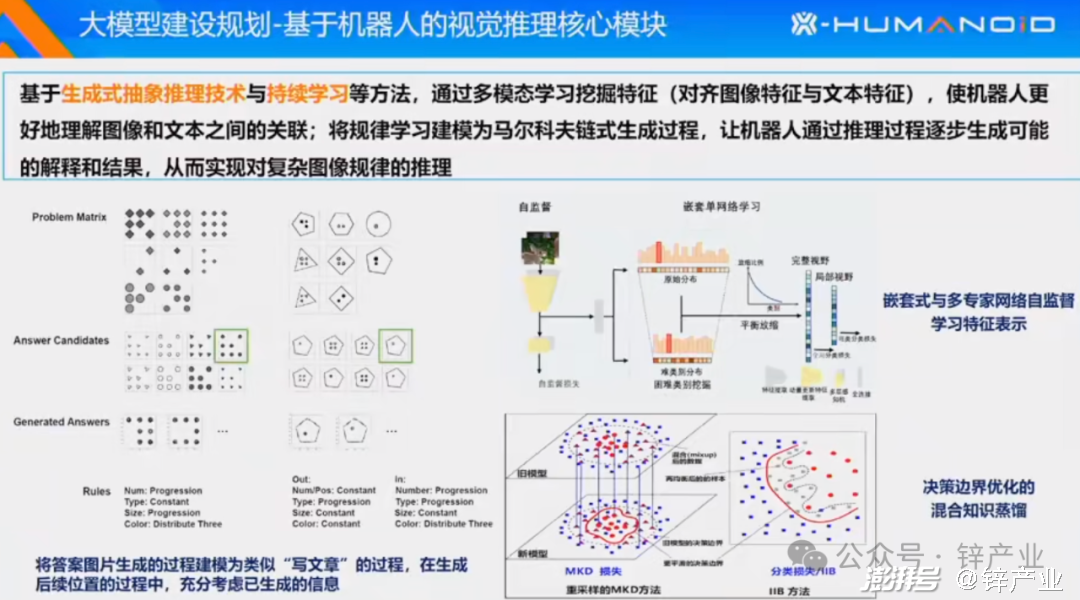
为了提升人形机器人视觉推理能力,在机器人的视觉推理核心模块方面,创新中心则会基于生成式抽象推理技术与持续学习等方法,通过多模态学习挖掘特征(对齐图像特征与文本特征),使机器人更好地理解图像与文本之间的关联。
将规律学习建模为马尔科夫链式生成过程,让机器人通过推理过程逐步生成可能的解释和结果,从而实现对复杂图像规律的推理。
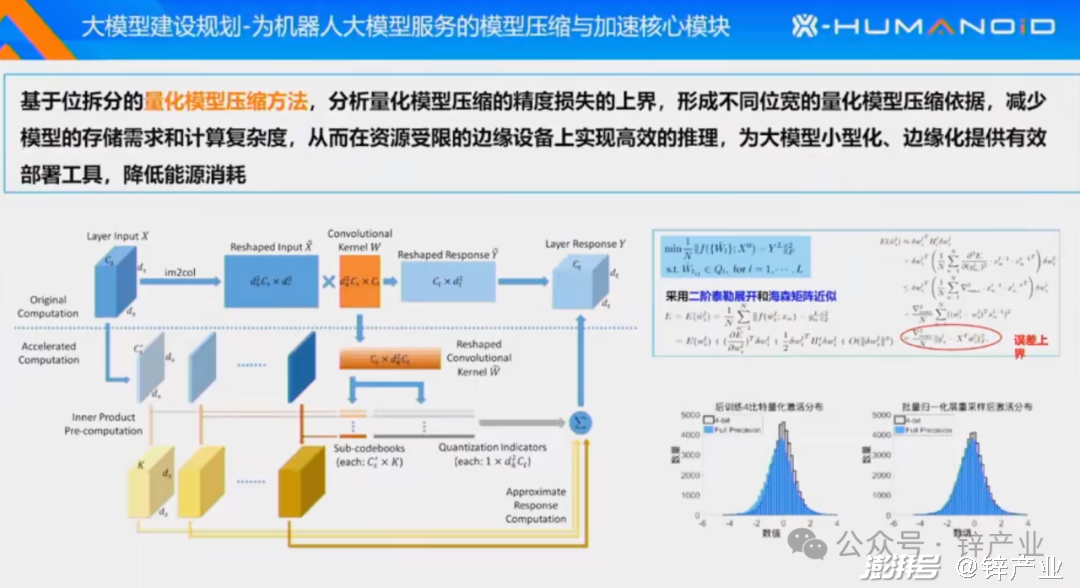
而由于机器人在本体端算力和成本受限的原因,往往又需要将大模型小型化,来构建可以在端侧部署的边缘小模型,这时,就需要做模型压缩和加速。
创新中心基于位拆分的量化模型压缩方法,通过分析量化模型压缩的精度损失上限,形成不同位宽的量化模型压缩依据,减少模型的存储需求和计算复杂度,从而在资源受限的边缘侧实现高效的推理能力。
就正在成为全球科技竞争焦点的人形机器人,国内各地不断涌现的创新中心,实际上是“政产学研用”的融合产物。
从北京人形机器人创新中心这次对外公开的规划中,锌产业了解到,创新中心在当下产业中希望扮演的其实是一个共性技术攻关者、产业生态构建者。
相较于全球科技巨头而言,国内目前还没有像谷歌研究院、微软研究院这样拥有深厚底蕴、无尽资源的产业研究机构,国内几家互联网/科技巨头也还没有在人形机器人领域投入足够多的资源来参与全球竞争。
创新中心想要做的,正是弥补这一块中国在全球科技竞争中的短板。
至于这样的人形机器人创新中心,如何输出产业价值?能够产生多大的能量?
将会是接下来中国人形机器人产业发展的一个重要课题。
本文为澎湃号作者或机构在澎湃新闻上传并发布,仅代表该作者或机构观点,不代表澎湃新闻的观点或立场,澎湃新闻仅提供信息发布平台。申请澎湃号请用电脑访问http://renzheng.thepaper.cn。



- 报料热线: 021-962866
- 报料邮箱: news@thepaper.cn
互联网新闻信息服务许可证:31120170006
增值电信业务经营许可证:沪B2-2017116
© 2014-2024 上海东方报业有限公司

