- +1
中国机器鱼凭啥“打卡”马里亚纳海沟?研究团队详解背后突破
人类如何探测深海?科学家们近年来尝试从深海里的生物寻找答案。
北京时间3月4日凌晨,顶级学术期刊《自然》(Nature)以封面文章的形式刊发了由浙江大学、中国科学院深海科学与工程研究所、国防科技大学、上海海洋大学、大连海事大学等团队联合完成的一项研究。该研究率先提出机电系统软-硬共融的压力适应原理,成功研制了无需耐压外壳的仿生软体智能机器人,首次实现了在万米深海自带能源软体人工肌肉驱控和软体机器人深海自主游动。
 之江实验室研究人员李国瑞,浙江大学航空航天学院博士研究生陈祥平、周方浩为论文共同第一作者,该研究的通讯作者为浙江大学流体动力与机电系统国家重点实验室、工程力学系教授李铁风。
之江实验室研究人员李国瑞,浙江大学航空航天学院博士研究生陈祥平、周方浩为论文共同第一作者,该研究的通讯作者为浙江大学流体动力与机电系统国家重点实验室、工程力学系教授李铁风。李铁风对澎湃新闻(www.thepaper.cn)介绍道,这项最新研究为深海探测作业、环境的观察和深海生物的科考提供了新的解决方案,有望大幅提升深海智能装备和机器人的应用能力,让柔性智能设备从常规环境走向深海作业等多样任务与复杂场景,又迈出了坚实的一步。
李铁风现年34岁,主要研究方向为软物质力学,智能材料结构设计、软体机器人、水下智能装备、医疗康复装置等,提出通过控制力电失稳实现极大电致变形的驱动理论。在Sciennce Advances、Advanced Materials 等期刊上发表论文50余篇,论文引用2000余次。获国家自然科学基金优秀青年基金、中国科协青年人才托举工程、科学探索奖(前沿交叉领域)、麻省理工科技评论科技创新35人(MIT TR35-China)等荣誉。
值得一提的是,李铁风等人从超深渊的狮子鱼中获得了灵感。在测试中,这款受狮子鱼启发而来的机器鱼能在马里亚纳海沟10900米深处成功驱动,还能在南海3224米处自由游泳。而早在4年前,李铁风等人发布的另一项研究显示,他们还曾从蝠鲼(又称“魔鬼鱼”)中获得灵感,设计了当时全球游得最快的软体机器鱼。
李铁风教授与本文主要作者。
来自超深渊狮子鱼的启发
海洋占地球表面的70%以上,但目前人类的探索仍局限在较浅的海洋深度,由于极端的静水压力等,深海基本上是未知区域。万米海底的压力有多大?李铁风表示,在10900米的海底,静水压高约110兆帕,相当于1100个大气压。用一个不太恰当的比方,相当于一吨重的小汽车全压在指尖上。
研究团队在论文中写道,精心设计的机器人在水下任务中可以提供出色的机动性和功能性,但在介于3000米到11000米之间的深海探索时,刚性机器人需要压力容器或压力补偿系统。然而,在极端条件下存在结构破坏的风险,刚性机器人在深海勘探仍然具有挑战性。
然而,生活在中等海洋深度(1000米左右)的软体生物,如章鱼和水母,它们没有庞大或厚重的耐压身体,却依然能够在海洋深处游刃有余。这些软体生物是软体机器人研究的最初灵感来源,并已被广泛研究,它们的深海中的适应性启发了水下软体机器人的设计。
研究团队提到,优雅的软体机器人设计为深海探测提供了途径。他们认为,最近的研究表明,具有拍打、波动和喷射等推进模式的软体机器人表现出了优异的游泳性能,尽管它们的执行器很软,结构也很灵活,但这些机器人的动力和控制电子设备仍然需要庞大而坚硬的容器来保护它们免受极端压力。一种没有刚性容器、能够在极端深度的海洋中游泳的软体机器人,目前还没有开发出来。
李铁风等人将灵感目标锁定在超深渊带。在海洋学上,透光层以下的区域常被定义为深海,深度一般在200米以下。按照深度不同进一步将其划分为中层带、深层带、深渊带与超深渊带。狮子鱼就是超深渊“居民”,中国科学院深渊科考队就曾在马里亚纳海沟和雅浦海沟通过着陆器获取过7000多米海底的多个狮子鱼样本。
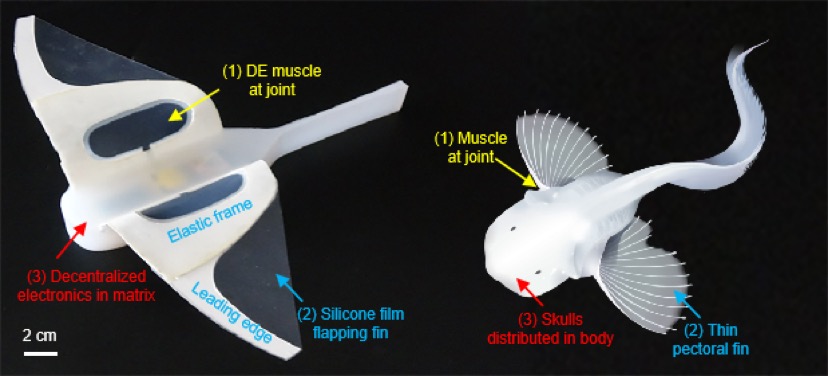
仿生狮子鱼深海软体机器人。
无需耐压外壳、电驱动人工肌肉
研究团队即受到超深渊狮子鱼身体构造的启发。论文中写道:这条鱼的身体特征包括分散式骨骼和摆动的胸鳍,这些特征指导了我们深海软体机器鱼的动力、控制和DE(介电弹性体)执行器的机械设计。
他们开发了一款能进行深海勘探的仿生软体机器鱼,整体有22厘米长(身长11.5厘米、尾长10.5厘米),翼展宽28厘米,大约为一张A4纸的长宽。
该机器鱼由软体人工肌肉驱动一对翅膀状的柔性胸鳍,通过节律性扑翅实现游动。控制电路、电池等硬质器件则被融入集成在凝胶状的软体机身中;通过设计调节器件和软体的材料与结构,实现了机器人无需耐压外壳,就可以承受万米级别的深海静水压力。
在《自然》同步在线发表的观点文章中,新加坡国立大学的Cecilia Laschi写道,李铁风及其面临的挑战之一是找到一种方法来保护机器人的电子组件不受高压的影响。
而研究团队正是从超深渊狮子鱼的骨骼中获得灵感。通过对深海狮子鱼的结构分析,研究团队发现深海狮子鱼的骨骼细碎状地分布在凝胶状柔软的身体中,有助于其在高压力环境下的生存与活动。因此,他们将电子器件分开排列,而不是像其他电子设备那样将它们集中在一起。
研究团队在论文中介绍了这一设计原理。如果在单个印制电路板(PCB)上密集封装所有电子器件,压力测试表明其接口容易发生故障。有限元分析(FEA)结果表明,压力导致的剪切应力集中在器件之间的接口。他们则采用分散设计,将器件分离到几个较小的印制电路板上,从而减轻剪切应力。有限元分析结果表明,在施加相同压力(110兆帕)下,分散式电子器件界面处的平均剪应力(大约10 兆帕)低于集中式电子元件(大约60 兆帕)。
研究还提到,从PCB上分离所有组件在技术上是困难的,因为它们数量庞大。为了减少这些组件之间的应力,他们还增加了相邻电子组件之间的距离。在我们的有限元分析中,当相邻组件之间的距离从0.4毫米增加到2.4毫米时,最大剪切应力降低了17%。
Laschi在上述观点文章中提到,实验室测试和模拟表明,这种排列降低了受压元件之间界面的应力。然后,这些分散的电子设备被嵌入到硅胶中,与机器人结合在一起。“这种方法比其他保护深海设备电子器件的方法更实用,也更便宜。”
“我们的研究目标就是以全新技术路线实现深潜器的小型化、柔性化、智能化,大幅降低深海探测的难度和成本。”李铁风说。
此外,电驱动人工肌肉也是这项研究工作的另一个重要突破。机器鱼要在深海中驱动,还需克服高分子材料在高压和低温时电驱动能力衰减的问题,研究团队研制了能适应深海低温、高压等极端环境的电驱动人工肌肉,在高压低温环境下依然能保持良好电驱动性能,即便是在马里亚纳海沟的低温(0-4℃)、高压环境(110 兆帕)下依旧能正常工作。
研究团队巧妙地利用了围绕在人工肌肉外的海水作为离子导电负极,由机器鱼自带能源在人工肌肉内外侧厚度方向产生电势差,让高分子薄膜发生舒张与收缩形变。由此,“翅膀”就能上下拍动,推动机器鱼水中前行。

驱动模拟。
“打卡” 马里亚纳海沟
李铁风等人通过大量的压力环境模拟实验来验证材料和结构的可行性,在实验环境下证明了机器人在深海、极地、高冲击性等恶劣及特种环境下,具有较好的发展应用前景。
随后,机器鱼被“Blue Rov”水下无人机带入水中,在70米深的湖中进行了测试,在那里它以每秒3.16厘米的速度自由游动。
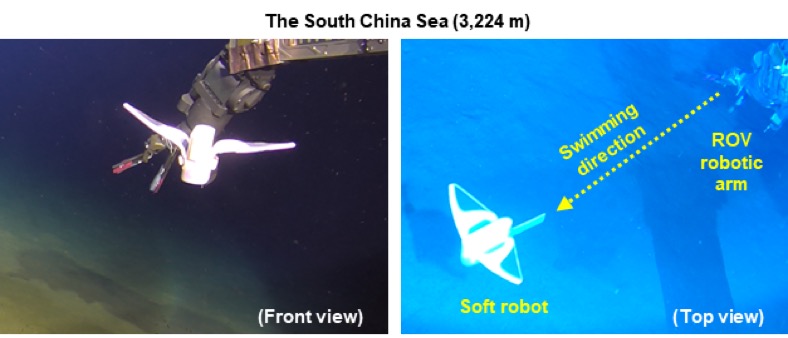
南海3224米深海海试。
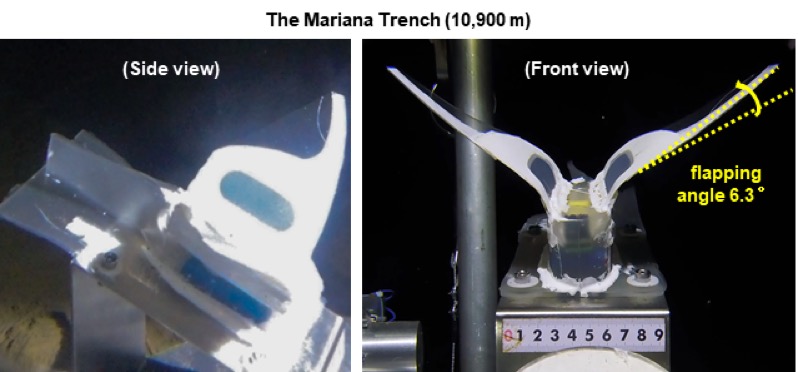
马里亚纳海沟10900米深海海试。
Laschi在上述观点文章提到,李铁风等人的研究获得了突破,嵌入软材料中的分布式电子元件取代了电子元件的刚性保护外壳,为开发新一代深海探险者铺平了道路。他同时提到,在这种设计的机器人进入海洋之前,还有更多的工作要做,这包括水下机器人的速度、承受较大扰动的能力,以及移动能力,这些都需要进一步优化以适应实际应用。
该论文审稿人认为,该工作会很大程度推进深海机器人的研究进展。



- 报料热线: 021-962866
- 报料邮箱: news@thepaper.cn
互联网新闻信息服务许可证:31120170006
增值电信业务经营许可证:沪B2-2017116
© 2014-2026 上海东方报业有限公司

