- +1
师法章鱼:折纸机械臂可用于内窥镜检查、导管等微型医疗设备
8月31日,国际知名学术期刊《美国科学院院报》上一项最新研究报告了一种受章鱼启发的折纸机械臂,未来有望用于内窥镜检查、插管等医疗应用。
“该机械臂变形模式多样,控制灵活,适宜复杂环境空间内的定位操作。其次,该机械臂采取无线磁场控制,功率源与驱动器无任何物理连接,因此该系统十分易于小型化和在受限空间内进行灵活和精确的作业。”论文共同第一作者吴帅与迮弃疾对澎湃新闻(www.thepaper.cn)记者介绍道。
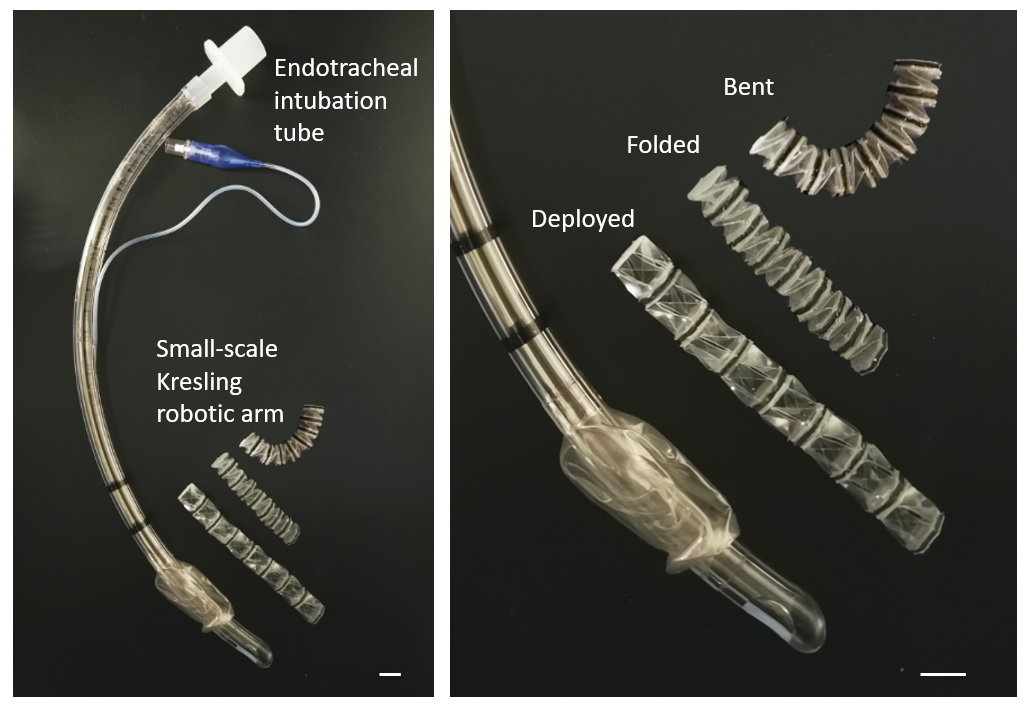
用于医疗的折纸机械臂 图片来源于受访者
该研究论文标题为《Stretchable origami robotic arm with omnidirectional bending and twisting》(万向弯曲和扭曲的可伸缩折纸机械臂),通讯作者为斯坦福大学教授赵芮可(原俄亥俄州立大学),以及佐治亚理工学院教授Glaucio H. Paulino。
论文指出,与传统依靠关节连接提供旋转和平移自由度的机械臂相比,章鱼的软臂能够进行更复杂的运动,例如大幅度变形、迅速捕食等。受此启发,人们探索了将折纸柔顺机构用于实现各种尺度的机械运动,可应用于生物医学设备和航空航天等工程领域。
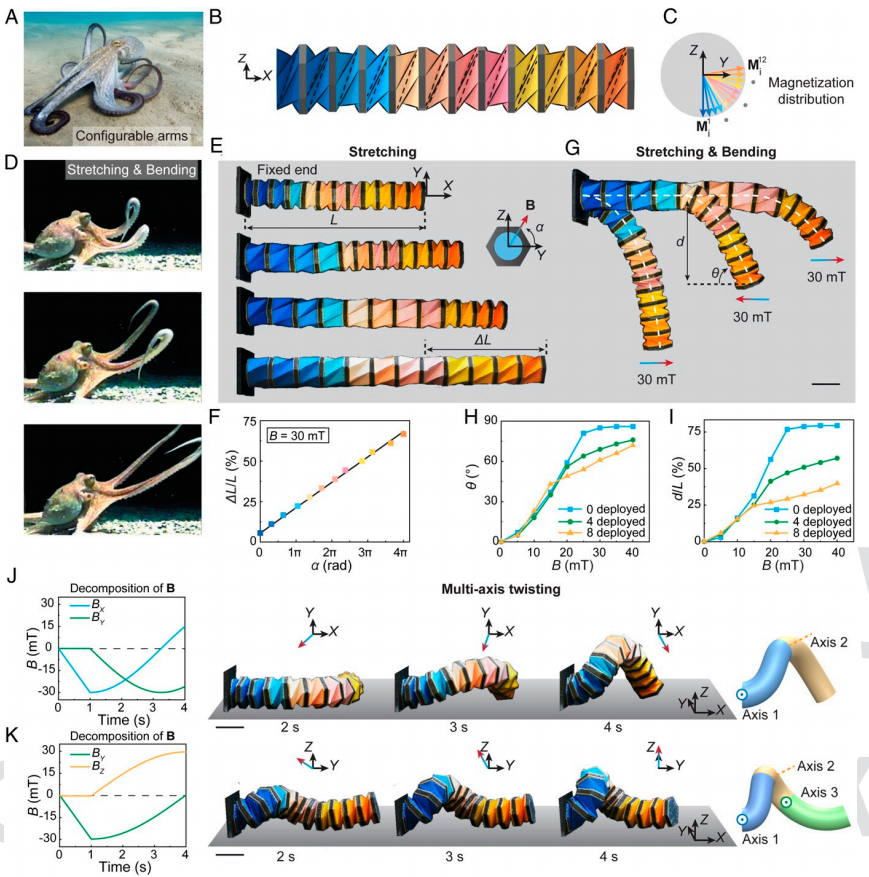
折纸机械臂模拟章鱼进行收缩、展开、弯曲 图片来源于论文
人们已经研究了不同折纸机制让机械臂进行收缩、展开、弯曲等运动,然而,大多数现有折纸机械臂运动的自由度有限,比如只能收缩或展开、单向弯曲和双向弯曲。虽然已经有了具有多个自由度的集成运动系统,但这通常依赖多个笨重的制动器或有线驱动(例如电机和气动泵),严重限制了机械臂在一些环境中的灵活性与功能发挥。
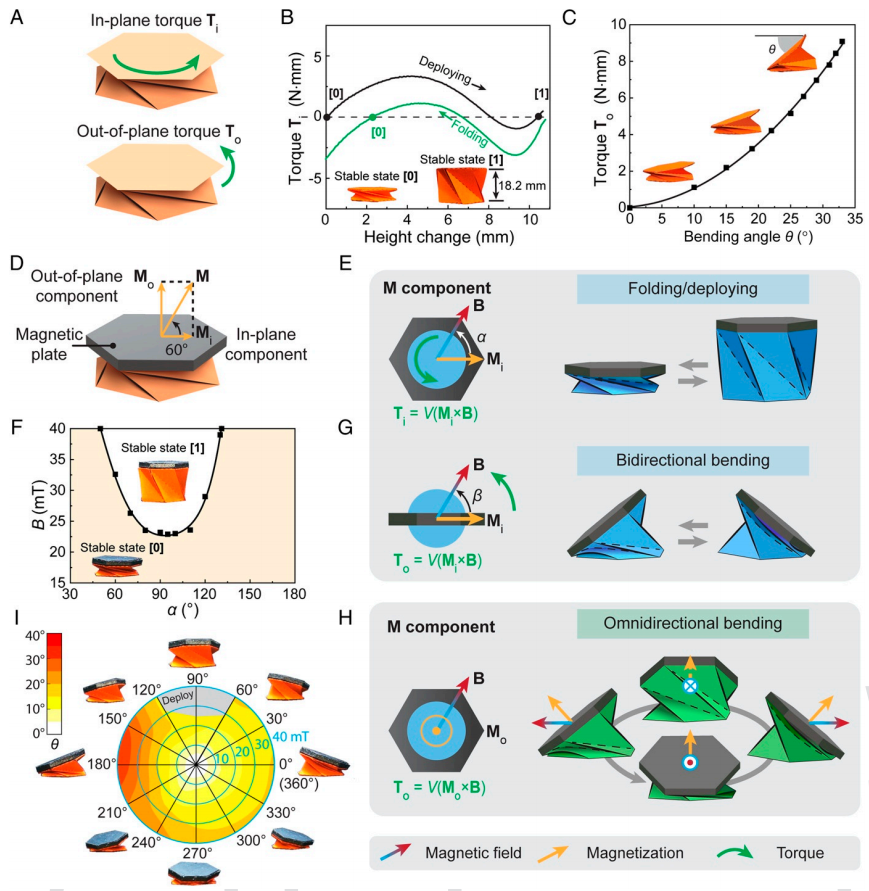
Kresling单元的驱动机制 图片来源于论文
关于此项研究的优势,迮弃疾介绍称,第一,机械臂可以同时实现伸缩、万向弯曲、扭曲等不同变形和物体抓取和操作等功能的集成;第二,灵活的设计自由度,可以通过定制Kresling单元数量及磁驱动器的磁化方向,满足不同的应用场合和目标功能需求;第三,采用远程磁场驱动,避免常规电机或气泵驱动所需的复杂管线,易于小型化和狭窄空间作业,特别适合人体内的一些应用环境。
“设计的过程中需要根据变形和功能的需求来设计折纸单元的数量、磁驱动器的磁化方向以及施加磁场的大小和方向,同时还需要考虑单元的机械和磁特性,该机械臂设计自由度高,但同时也带来了很多不同的设计变量需要考虑,设计过程较为复杂。”问及研发该折纸机械臂的过程的主要困难,吴帅表示。对此,他们考虑结合机器学习的方法辅助设计过程,之前的研究工作也曾借助优化算法来完成磁驱动机器人的设计,取得了很好的效果。
最后谈及未来发展方向,迮弃疾表示“我们希望进一步的推进在医疗方面的应用,比如,逐步进行肠胃模型实验和动物实验,并通过分析实验过程中遇到的困难,以及和医生了解真实的临床需求来优化机械臂的结构和功能设计。”
论文链接为:https://www.pnas.org/content/118/36/e2110023118



- 报料热线: 021-962866
- 报料邮箱: news@thepaper.cn
互联网新闻信息服务许可证:31120170006
增值电信业务经营许可证:沪B2-2017116
© 2014-2024 上海东方报业有限公司

