- +1
交通设施|自动驾驶:交通规则的难题
遵循交通规则还不足以让机器像人一样开车。
工程师一直在推动自动驾驶汽车的使用。逻辑也很简单:为汽车配备摄像头和各类检测器,跟踪周围所有物体,教车载计算机了解交通规则,让它们自行导航到目的地。
这样的想法大致合理,并不神奇,只是对人类驾驶的模仿。不过,机器驾驶无法模拟人类复杂的社交能力。譬如,无法与他人进行眼神交流以确认谁拥有通行权,难以理解周边车辆、行人的行为或手势,因此常有一些愚蠢表现。这些交流示意难以用清晰明确描述,即使在人眼中很“简单”,也隐藏着非常复杂的社交规则。

2016年冬,汽车进入城市。澎湃新闻记者 周平浪 图
社交互动的规则,是当前阻碍自动驾驶实现的一个深坑。例如,人行横道边上,行人低头看手机,人类司机会根据自身的经验,来判断此人是站在原地不动,还是心不在焉边看手机边准备过马路;而机器驾驶难以对此作出判断。即便机器驾驶能够判断这类场景,也难免滑入被路人故意设好的社交陷阱。这已被诸多试验证明。
两年多前,笔者在写“为什么要发展无人驾驶车辆”一文时,自动驾驶还是风险投资宠儿。两年后,不确定的大部分事项已基本确定。还不确定的事项也已清晰,且屈指可数。两年前的不确定因素,是当时有限能力的检测器和算力导致,虽然现在没有完全解决,但随着时间推进,迟早都能解决。剩下的只是性价比的竞争而已。
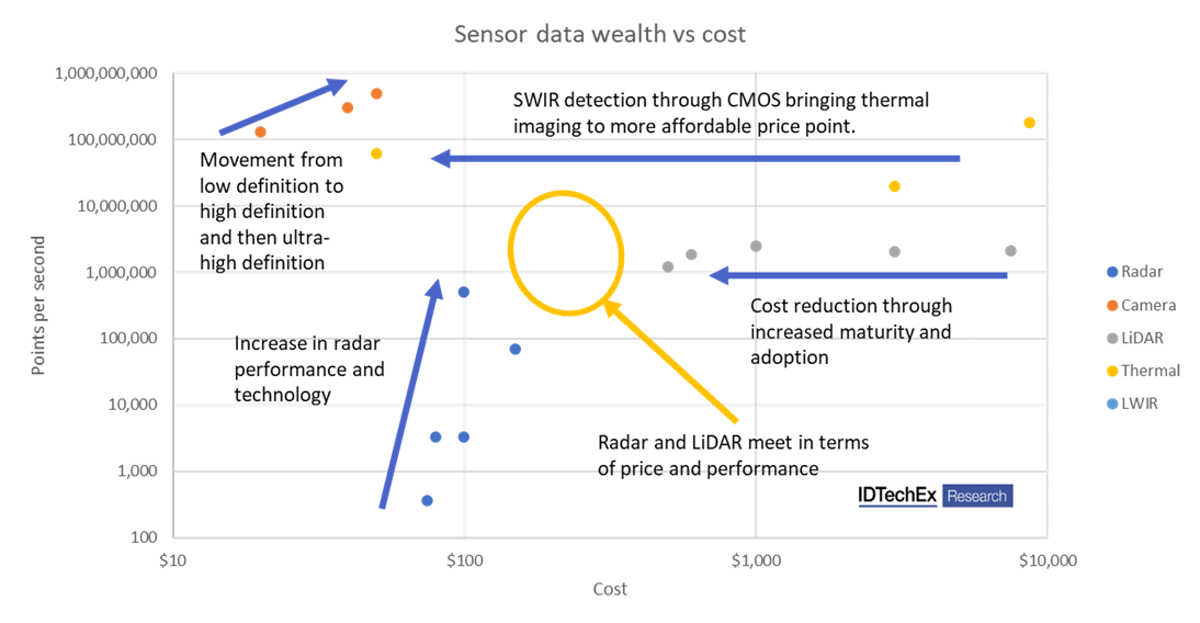
自动驾驶车辆各类检测器的数据质量与费用比较的趋势,
source:Autonomous Cars, Robotaxis & Sensors 2022-2042,Dr James Jeffs,2021.8
因此,制造检测器、计算芯片、自动驾驶组件的公司,这两年已取代自动驾驶整车公司,成为资本宠儿。许多人已把自动驾驶行业类比为手机行业。在手机行业里,要么成为有生态圈的苹果、谷歌等,要么成为做芯片、重要元器件的供货商,否则,只能赚点组装厂的微薄利润。即便打着高科技旗号,也改变不了以摆弄螺丝刀为核心技术的角色。
也许,自动驾驶的产业格局,已经快要成型了。
人类司机和自动驾驶车辆遵守交通规则的过程
自动驾驶车辆的种类很多。有常见的小汽车、出租车、公共汽车,还有这几年成为投资重点的货车、外卖快递投递车和农用机械拖拉机等。凡是公共道路上使用的运载工具,大致都可归入自动驾驶车辆(vehicles)。
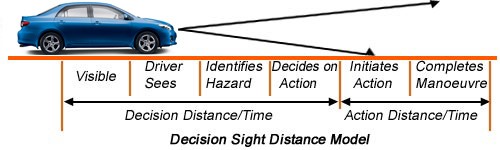
公共道路上场景的不确定性和其数量的无尽性,迫使自动驾驶车辆不能像普通的自动化机械一样,设定好确定的场景,按照固有流程解决。场景的即时性和多样性,使得自动驾驶车辆遵守交通规则,也必须经过和人类司机一样的过程,也即:发现 -> 理解 -> 决策 -> 行动。用自动驾驶车辆的语言来翻译,则为:探测到(sensing)、理解(perception)、地图重构(mapping)、行为规划(planning)、行驶(piloting)。交通规则和社交的作用,通常出现在这个过程中的理解(perception)、地图重构(mapping)、行为规划(planning)三个环节。
人类司机和自动驾驶车辆反应过程的对比:(a)人类司机的反应过程

人类司机和自动驾驶车辆反应过程的对比:(b)自动驾驶车辆的“反应”过程
自动驾驶车辆对现实世界规则的理解方式
自动驾驶车辆对现实世界的理解,是基于对周边环境的探测,通过探测、理解得出判断结论,譬如所在位置,是市中心还是郊区,是交叉口、停车场还是路段,当前路段限速是多少,等等。
对现实世界的规则理解,相当于设定好自动驾驶车辆使用的交通规则。不过,仍然存在一些行为,自动驾驶车辆虽能探测,但难以理解其规则。譬如有后车或对向车辆频繁切换近光灯远光灯形成闪烁的提醒,或前车后窗贴着“我是新手”、“Baby in car”等文字表达的规则需求。

2021年,国内发生了几起L2级别自动驾驶车辆在高速公路的交通事故。其中一起,是在施工作业区撞到施工车辆;还有一起,是追尾撞上一辆开得较慢的货车。其问题应该都出在“理解”上。自动驾驶不能理解施工作业区是什么,不能理解跟在开得慢的货车后会追尾。
具体说来,自动驾驶车辆安装的许多检测器,采集到的数据并不是实体,只是散点或图片。这无数的散点和图片,需通过处理,才能对应可被机器理解的实体,如障碍物、车辆、行人、标志、标线等。而将散点变成实体,这项“理解”的工作,当下大部分由专业厂商供货的组件完成。今年在高速公路上发生事故的两辆车,虽然整车厂商不同,刚好用的是同一家供货商的组件。这些不常见的道路元素,未曾让这些组件识别过,机器自然无法将探测到的散点“理解”为交通锥、货车尾部。
要改正这样的问题,当前对自动驾驶车辆来说,并不算难。而如果交通规则出现太多变化,对自动驾驶是难题,对人类司机也同样是难题。
譬如,国内施工作业区虽已有许多规范约束,但也在操作层面存在不同理解。经常会遇到这种情况,许多未经培训的基层人员,根本不了解规范和技术要求,按自己的理解,摆出各种“花式”施工作业区。
交通规则的统一,要体现为交通控制设施的统一。当前各类“花式”的交通设施,如彩色斑马线、彩虹标线、隧道灯光诱导等,充满歧义,形成干扰,即便专业工作者也难以分清其含义,何况自动驾驶车辆。
例如,路上的诱导灯,无特殊事件发生时也会闪烁,形成的视觉污染和心理压迫,对人类司机无疑是干扰,既没有传递有效信息,还增加驾驶任务的负担,使其判断容易出错。对自动驾驶的影响也同样巨大,机器不得不在一堆混乱的光线中,提取信息含义,分辨闪烁原因。
这样的做法,会混淆人们对闪烁含义的理解。路侧不停闪烁,到底是有事情发生,还是上了个花式交通设施,刷刷存在感?如果没事路侧就闪烁,那些停在路边打双跳灯的车辆,还能传递出“有事发生”的信息吗,路上还会安全吗?
自动驾驶车辆对现实世界的理解,是模拟人类司机对现实世界的理解而形成的。路上规则如果出现逻辑混乱,聪明人或许可以取巧猜到,而自动驾驶车辆只是机器,并无灵机一动的可能,无法逾越规则歧义导致的混乱深坑。因此发生事故也是可预期的。
当前急需的,是统一交通控制设施的规则和使用,如交通标志、标线、信号灯等这些设施,使其逻辑合理且容易阅读识别,有效传达交通规则信息。
只有路上的规则清晰、明确且统一,才会为人类驾驶或自动驾驶的安全提供保障。
source: How AI Improves Radar Perception for Autonomous Vehicles,NVIDIA DRIVE Labs, 2021.4(01:26)
自动驾驶车辆使用的地图,和人类使用的地图不同。机器不会去了解与其任务无关的信息,不会关心偶遇的饭店、公园这些人类觉得有趣的地方。但是,机器需要知道:自己在哪里,在哪条车道上;障碍物有哪些,离自己多远;周边车辆或行人的下一步趋势是什么;当前应该遵守哪些交通规则,规则是什么样的,等等。
因此,自动驾驶地图是实时的距离地图。对汽车来讲,关心的是当前车道和交通规则;对投递车来讲,关心的是当前人行道和规则。
每家自动驾驶车辆厂商,都有自己的地图解决方案。有些选择先详细测量再实时添加信息的方式,形成自动驾驶地图;而有些主要利用探测设备实时生成构建自动驾驶地图。早几年被认为有前景的自动驾驶地图产业,现在差不多被包含在自动驾驶车辆厂商里,没法独立存在。也许过几年还会变,谁知道呢?
自动驾驶车辆的地图重构,即是交通规则在实时地图的具象化,也是对其他用路人基于规则的短时趋势预测,为自身行为的决策规划做基础。譬如,在进入一个交叉口的过程中,自动驾驶车辆要判断探测到的所有实体,哪些是障碍物,哪些是用路人,还有通过标志标线信号灯形成当前的交通规则。
在与交通规则相关的交通控制设施中,标线差不多是最普遍也最重要的设施,无论对人类司机还是对自动驾驶车辆。可惜,我国的交通标线实际应用技术上仍存在许多缺憾,难以对开车形成较好的支持。
譬如,一到下雨天,就看不清标线,也分不清车道,下雨天的事故或拥堵,一多半可以怪在标线上;又譬如,路上经常出现左边是黄线,右边也是黄线,而司机对黄线的理解是分隔对向交通流,而两边都是黄线,司机就会怀疑自己是不是跑错车道;或者,到了交叉口前,由于入口车道增加,原来连续的纵向标线断掉了,该怎么走,通行权在哪里,缺乏清晰的指示。
路上大部分交通规则,是用标线表达。每一条标线都有含义,自动驾驶车辆需要识别出来,并添加到自动驾驶地图,构建出规则地图。有规则,才能预测他人的行为,才能决定自身行为。这是人类的开车逻辑,也是机器开车的逻辑。
在规则基础上,预测他人的短时趋势,这是地图重构要做的。预测趋势,对机器的挑战,远比人类要大。人类在驾驶中,一眼可以看清谁会影响到自己;而机器驾驶,要对所有探测到的车辆、行人等编好号,根据规则来预测这些实体的下一步路径。对在车道里行走的车辆,则是通过车道的规则来判断,譬如左转车道的车辆应该会向左转,右转车道的向右转;路段上打着转向灯的车辆,则打算换车道行驶,等等。
不过,万一碰到人用手势、眼神或文字来表达的协商,譬如微微点头或友好微笑,礼让别的车先走,则会难倒机器驾驶。因为,这些手势、眼神、文字包含当地社交文化或行为所处的背景含义。目前,一些自动驾驶车辆已看得懂停车的指挥手势,但还没有车辆能看懂人的眼神交流,或一些微小动作的含义。幸好,眼神交流协商通行权的场景,通常出现在停下时,看不懂的后果,多半只是延迟一会儿,没有太多安全上的问题。
当前有许多车辆厂商放出在国内测试自动驾驶的视频。有时会看到压标线实线的场景,也会看到交叉口转弯时轨迹不合理越过中心实线的场景。这些视频中的违反交通规则行为,虽然大部分不严重,但足以说明,其在自动驾驶地图重构时,放弃了对一些交通规则的嵌入。这也许是由于当时当地交通规则本身不合理,也许是厂商在国内测试时不理解交通控制设施的重要性,从而忽视了规则地图的完整性。不过,在这样环境下测试出的车辆,会不会给用户带来罚单或惹事呢?
一些自动驾驶厂商对这些避而不谈,把话题引到智能网联或车路协同,以解决自动驾驶能力不足。但是,规则如果缺失,唯一方法是补齐规则,标线断了划标线,标志丢了立标志,加上一大堆貌似高科技的设备也不能找回规则。
自动驾驶车辆行为规划过程中的规则考量
行动规划的前提是安全,自身安全和他人安全,这对人和机器都一样。
除确保安全以外,行驶的意图和通行权(right of way)是其他两个约束条件。例如,在交叉口打算右转弯,这是行驶意图;判断自己是否在右转弯车道或最右侧车道,信号灯或标志是否允许右转弯,行驶路径上有没有行人或非机动车等,这是通行权是否获得的判断。然后,在确保安全和获得通行权的前提下,根据意图规划下一步行为,即右转弯。
在规划行为的过程中,自动驾驶车辆需要纳入计算的,不仅是明确的规则以描述安全和通行权问题,还包括隐形的规则,参与到安全与否、通行权获得与否的判断过程。
明确的规则,通常是以标志、标线、信号灯表示,司机或机器一看就明白。而隐形的规则,则是开车社会习俗和文化形成的。譬如,即便有通行权,司机也不会做那些明知可以避让,却贸贸然撞行人、非机动车的行为。针对这些隐形的规则,有些厂商(Mobileye等)提出几条行为规划安全原则,大致可用文字说明如下(具体规则用数学和物理公式描述):
规则 1. 不要撞到前面的车(保持纵向距离);
规则 2. 不要鲁莽的切入其他车道(保持横向距离);
规则 3. 获得通行权并不是通行的全部条件;
规则 4. 低能见度或者视距遮挡视线不佳的区域,要遵守防御性驾驶原则;
规则 5. 如果能规避车祸且不引起其他事故,必须采取规避行为。
这些自动驾驶车辆认为的隐形规则,只是人类社会开车时默认的社交礼仪,譬如跟车需要保持两三秒的车距,避免急刹后追尾这样的默认规则。这些规则,已被自动驾驶车辆厂商采用。
实际上,不同厂商采用不同的隐性规则,总体会比这些更多。无论哪个国家或地区,纸面上的交通规则,要远少于大家认可约定俗成的规则。这也是自动驾驶曾经或正在面临的规则困境。默认规则有哪些,需要在各地实践中逐步添加。
source: Implementing the RSS Model on NHTSA Pre-Crash Scenarios,Mobileye an Intel Company,2019(02:42)
 无论对人还是机器,规则都不应含糊,不应缺失细节,造成逻辑上的歧义甚至混乱。如今路上的交通拥堵和事故,或许有些和规则含糊有关。
无论对人还是机器,规则都不应含糊,不应缺失细节,造成逻辑上的歧义甚至混乱。如今路上的交通拥堵和事故,或许有些和规则含糊有关。这些含糊的交通规则,可能是因为宣传太少,也有可能是标准规范不严谨,甚至有可能是学者自己也没搞明白的原因。无论是哪种,都需要赶紧解决。
遵循交通规则虽然还不足以让机器像人一样开车,但交通规则含糊,则不足以让所有人安全开车。
(作者郭敏系杭州交通工程师)



- 报料热线: 021-962866
- 报料邮箱: news@thepaper.cn
互联网新闻信息服务许可证:31120170006
增值电信业务经营许可证:沪B2-2017116
© 2014-2024 上海东方报业有限公司

