- +1
LAM | 表面形貌测量的极限在哪里?
撰稿 | 刘子维(英国剑桥大学,博士后)
全息最有趣的特征可能是可以重建物体的三维外观,人们自由改变观察视角并局部聚焦于物体表面。物体重建看起来与真实物体的相位和幅度无法区分,而且全息术是基于波的干涉叠加,这表明了其可用于超高精度的表面形貌测量,如全息干涉测量。
复杂波场的记录和计算处理,为光学三维计量的新方法提供了广阔领域,全息图记录了来自被测物体的复杂场,可以通过光学或计算方式读出。为进行适当的源编码,可以通过在全息板前面放置一些光学仪器,如剪切板,来修改记录信息,还可以在全息图后面放置任意光学仪器,来提取有关物体的特定信息。
针对全息与非全息方法测量表面形貌的潜力和极限,今日,来自德国埃尔朗根-纽伦堡大学的 Gerd Häusler 联合美国西北大学的 Florian Willomitzer,在 Light: Advanced Manufacturing 上发表了文章“Reflections about the holographic and nonholographic acquisition of surface topography: where are the limits?”。
本文比较了全息表面干涉测量与四种基于非全息原理的方法之间的基本异同,包括三角测量,粗糙表面干涉测量,坡度测量方法和经典干涉测量等。重点深入分析了测量不确定性的物理极限的根源以及形貌信息的编解码方式,这将帮助光学计量学家确定其测量结果是否可以改进或已经达到物理学极限。

表:不同类型测量方法之间的基本区别,和计算相应极限的方法
三角测量
粗糙物体的全息与条纹投影三角测量的相机图像外观上十分相似,如图1所示。两者都具有能够对局部物体深度进行编码的载波频率的条纹。而且,全息图的解码在理论上与单次条纹投影三角测量中的解码过程相同,都是基于傅里叶变换轮廓测量。两者都通过单边带解调进行解码,通过将零阶与正负一阶衍射光分离来实现。此外,这两种方法都有相同的空间带宽极限:只有 1/3 的可用空间带宽可以使用。对于全息和干涉测量常见的静态对象时,标准的做法是通过移相将 2/3 的昂贵的空间带宽替换为时间带宽。
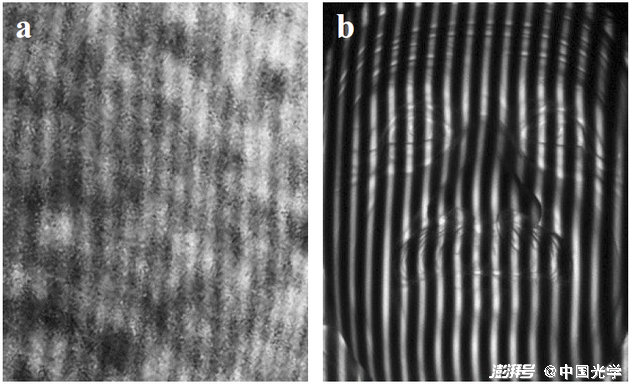
图1:全息(a)编解码和条纹投影三角测量(b)相似性比较。
使用激光照明对粗糙表面进行三角测量,受到散斑的严重干扰,存在严重的测量不确定性,因此全息不是通过三角测量法测量表面形貌的首选方法,需要通过如焦点搜索等相关方法。这种不确定性限制主要由观察孔径决定,通过全息图和通过数字反向传播的间接测量的三角测量也必须归于 I 类。因此,通过焦点搜索等方法进行全息粗糙表面形貌测量,其最终不确定性在很大程度上取决于观察孔径,而不是经典干涉测量中低得多的光子噪声,但利用全息术可以轻松提供大的孔径,尽管会有散斑噪声,但不确定性可以相当高。
总之,作为经典干涉测量术,尽管全息术通过传播波的相位对距离进行编码,但如果没有额外的信息,就不可能破译表面形貌。经典干涉测量通常着眼于像平面,因此需要有关于物体位置的先验信息,如果没有这些附加信息,干涉测量只能测量波前,但不能测量远处物体的真实表面形貌。
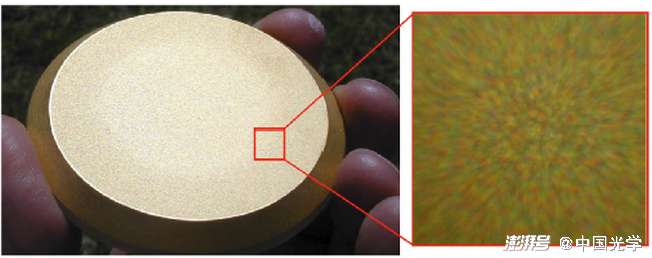
图2:入射孔径角与观察孔径角接近情况下,太阳光照射下的毛玻璃图
粗糙表面干涉测量
存在于散斑图案中的随机相位,阻碍了使用单波长干涉法测量粗糙表面的形貌,现在成熟的解决方案是相干扫描干涉测量,也可以通过双波长全息实现基于轮廓获取形貌,即首先通过用一个波长 λ₁ 的光照射物体和全息板来制作表面的全息图,然后全息板和物体用与第一步中略有不同的波长 λ₂ 照射。用 λ₂ 照射用 λ₁ 记录的物体,并与 λ₂ 照射的物体的波叠加,干涉图案就会显示合成波长在一定距离的轮廓线。两个波长之间的相位去相关,使得测量不确定性限制只有表面粗糙度,虽然是近似值,但可以找到测量不确定度的物理原因,通过对粗糙表面的严格定量分析,结果也非常相似。
因此,我们可以将双波长全息术和双波长干涉测量归为类 III,其主要噪声的物理来源具有相似性,因为这两种方法都利用了两个波长的相互作用,它们仅利用时间或光程的变化,使得高度不确定性的最终极限由表面粗糙度决定,而不依赖于观察孔径,因此,粗糙表面相干扫描干涉测量法的最终不确定性仅由物体决定,而不是由仪器决定,这是一个十分重要的物理和信息理论特性。
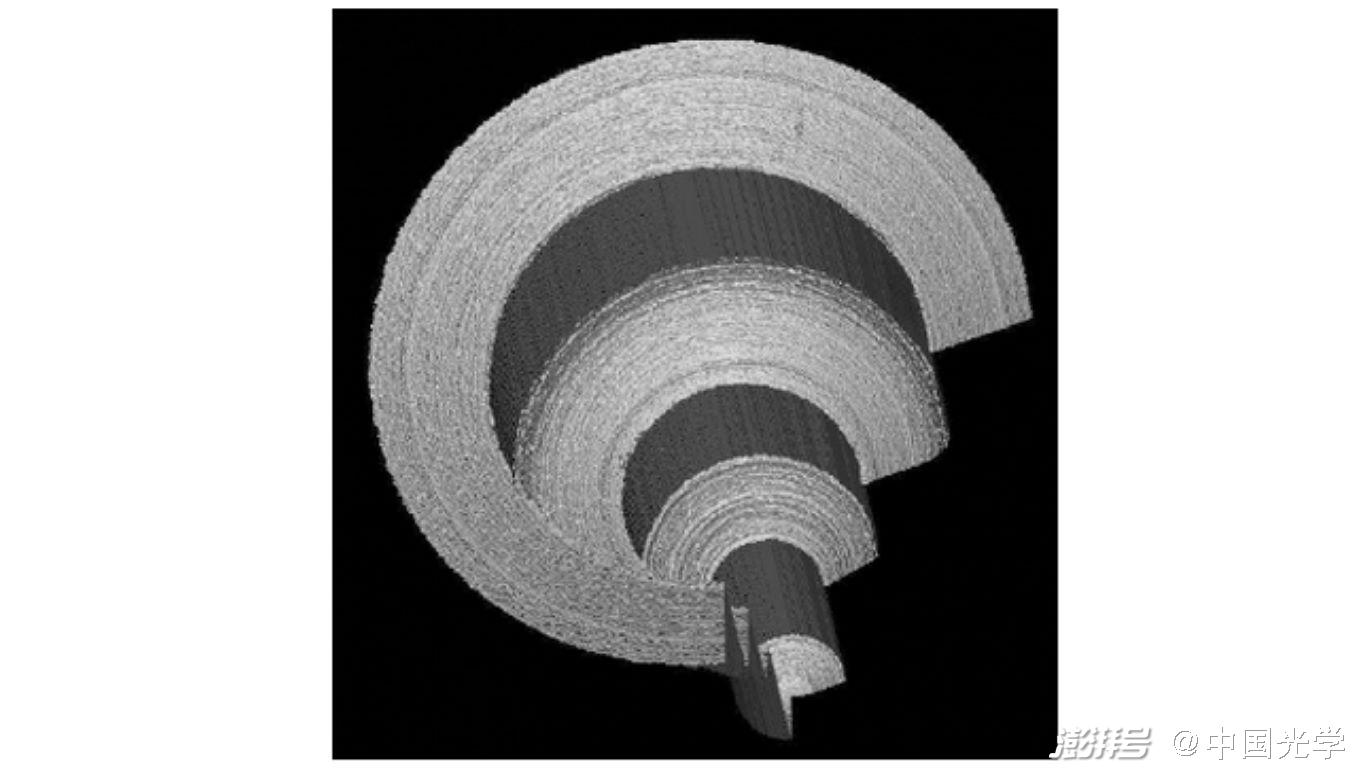
图3:粗糙表面的相干扫描干涉测量法测得的喷嘴形貌图
坡度测试方法
坡度测试方法的本征信号是局部坡度,在物理上与前面两种方法完全不同。本征意味着坡度不是通过后验微分评估的,而是在到达光电探测器之前已经编码在光信号中。因此,可以通过非常简单的方法实现亚纳米不确定性的局部表面高度变化的测量。这类空间微分方法中,就包括了所谓的相位测量偏转法以及经典的剪切干涉法,这两种方法主要用于测量镜面或波前,而对于粗糙表面,则采用剪切全息术。
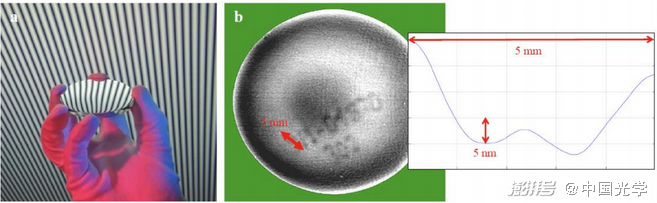
图4:相位测量偏转法。a基本原理,b深度图
为了了解剪切全息术的物理极限,将激光光斑投影到物体上。在全息平面上,生成具有目标散斑直径的图案,与横向移动的自身图案相叠加,只要横向剪切量小于散斑直径,由于每个散斑内的相位去相关,就可以看到带有一些相位噪声的条纹,这种相位噪声会导致测量不确定性,即瑞利焦深。显然,粗糙表面的剪切干涉测量法作为测量局部距离的工具,与焦点搜索方法具有相同的不确定性极限,因此这种情况下它属于 I 类,即在粗糙表面上剪切全息相当于测量局部距离的三角测量。散斑剪切图利用对环境扰动的鲁棒性来测量表面“坡度”的非常小的变化,灵敏度取决于剪切量,该方法对散斑去相关敏感,对于接近波长的形变,相位去相关可能占主导地位。因此,只有在非常小的表面变化的假设下,不确定性才可能受到光子噪声的限制。
经典干涉测量
对于镜面而言,全息属于II类——经典干涉测量,因为这里的不确定性受到光子噪声的限制。而对于粗糙物体的全息干涉测量,将物体与自身略微的形变进行比较,正如对散斑剪切成像所讨论的那样,比较了两个高相关性的散斑中的相位,只要去相关性非常低,不确定性就是受到光子噪声的限制,就像经典干涉测量一样。然而,这不是一个简单的二元问题,因为相位去相关和条纹的去局域化会随着形变的增加而发生。
总结
全息术提供了令人惊叹的三维图像的呈现,以及对复杂波场的底层存储和几乎无限的计算处理选择。本文了解了最终限制可实现的测量不确定性的主要噪声的物理来源,使得全息法可以结合到基于非全息的四类方法之一,由主要噪声的物理原因和观察孔径的依赖性来确定。未来的研究人员可能会从了解和利用基本极限中受益,开发新的算法,来更好地利用全息术。
| 文章信息 |
Häusler et al. Light: Advanced Manufacturing (2022)3:25
本文为澎湃号作者或机构在澎湃新闻上传并发布,仅代表该作者或机构观点,不代表澎湃新闻的观点或立场,澎湃新闻仅提供信息发布平台。申请澎湃号请用电脑访问http://renzheng.thepaper.cn。



- 报料热线: 021-962866
- 报料邮箱: news@thepaper.cn
互联网新闻信息服务许可证:31120170006
增值电信业务经营许可证:沪B2-2017116
© 2014-2024 上海东方报业有限公司

