- +1
Nat. Machi. Intell.速递:面向自主机器人的层次生成建模
原创 集智编辑部 集智俱乐部

关键词:具身人工智能,分层生成模型,机器人学,运动控制,嵌套时间尺度
论文题目:Hierarchical generative modelling for autonomous robots
论文来源:Nature Machine Intelligence
论文链接:
https://www.nature.com/articles/s42256-023-00752-z
人类通过计划、执行和组合个体肢体运动,来产生复杂的全身动作。近日发表于Nature Machine Intelligence的最新研究考察了运动控制的这一基本方面,并通过分层生成建模(hierarchical generative modelling)与多级规划方法来解决自主任务完成问题,模拟人类运动控制的深层时间结构。
该研究探讨了嵌套时间尺度的时间深度,其中前向或生成模型按照连续层级展开,例如,物体传递既需要全局规划,也需要局部协调肢体运动。这种时间尺度的分离表明,对全局规划和个体肢体的局部控制进行分层组织具有优势。研究通过物理模拟广泛验证了文中提出的公式。使用分层生成模型展示了一个具身人工智能系统,即一个类人机器人,可以自主完成需要综合运动、操作和抓握的复杂任务:机器人灵活地取回并运输盒子,打开然后穿过一扇门,踢足球,并在身体损伤和地面不规则的情况下表现出强大性能。
这些研究结果证明了人类启发的运动控制对于具身人工智能机器人的有效性和可行性,并强调为了实现具有挑战性的目标导向任务的自主完成,公式化的分层架构的可行性。
表:层级运动控制的关键原则,以人类运动控制和研究中的机器人为例
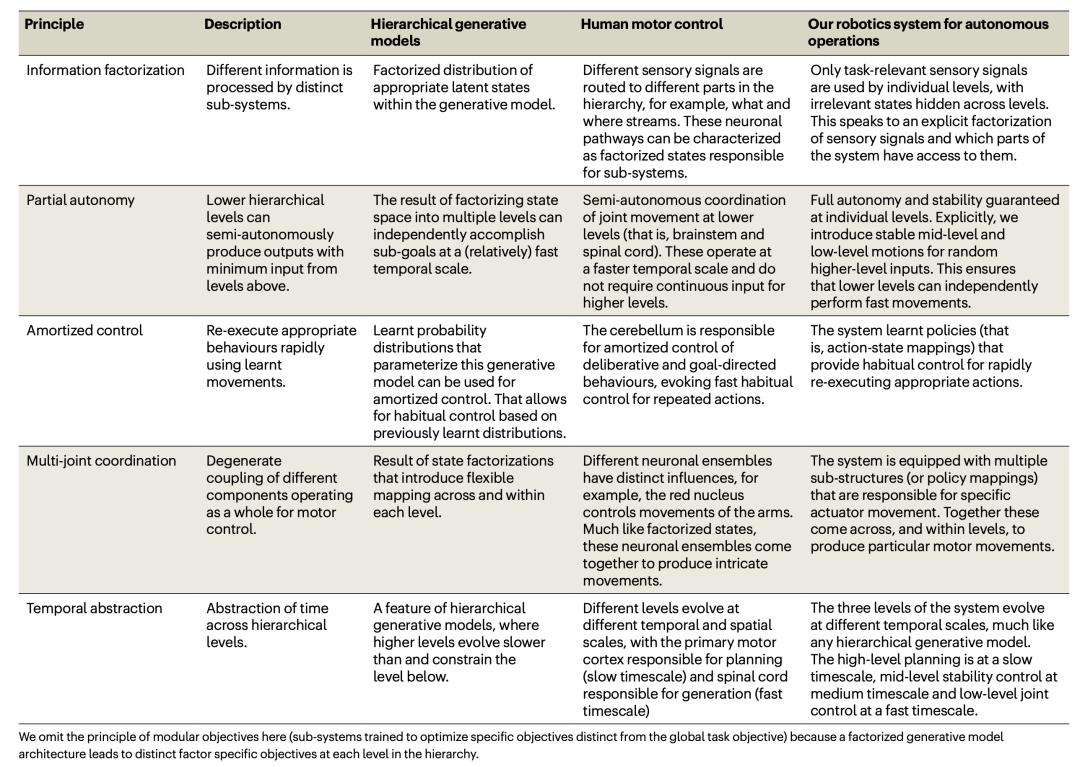
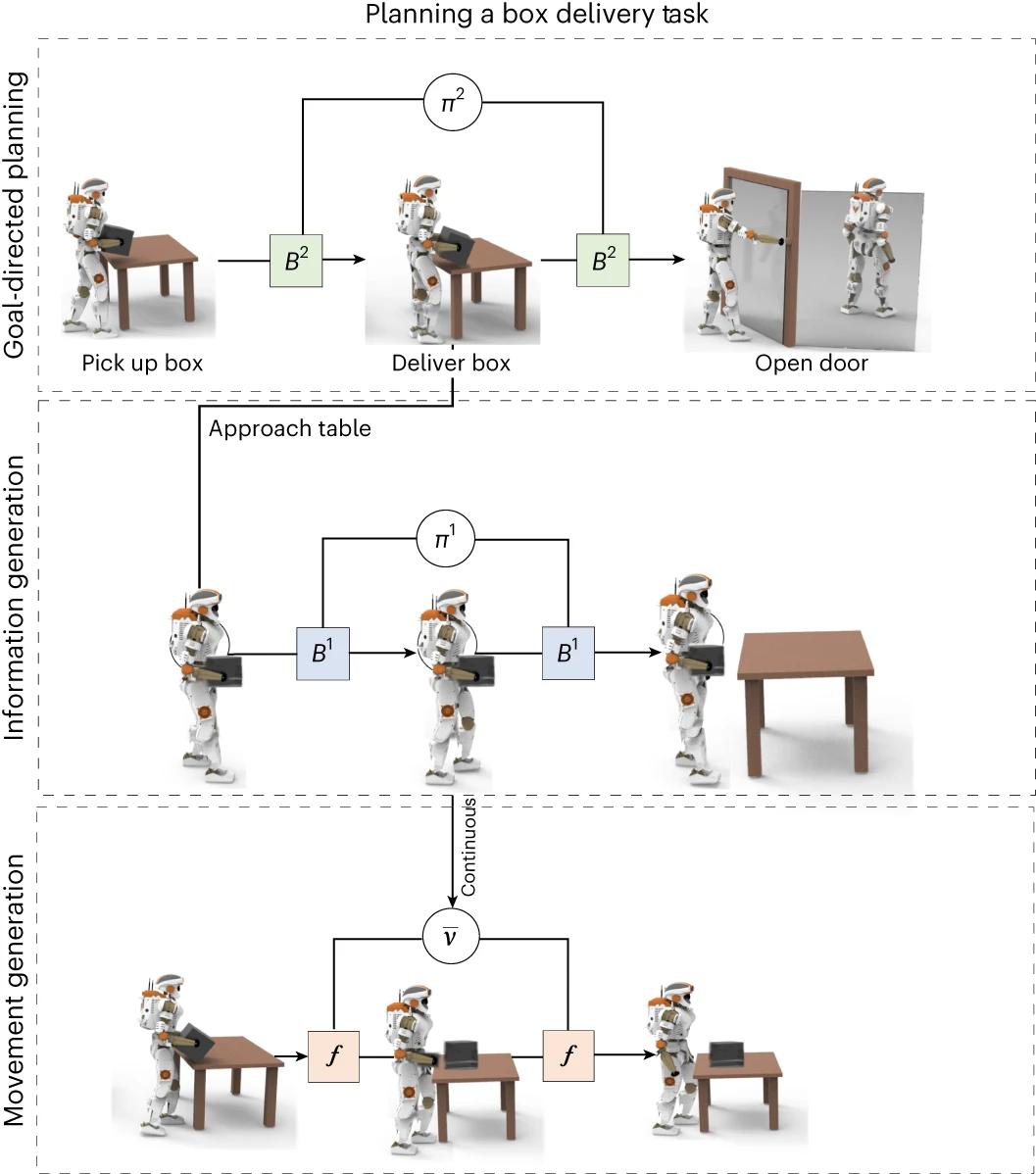
图1. 搬运盒子的分层生成模型
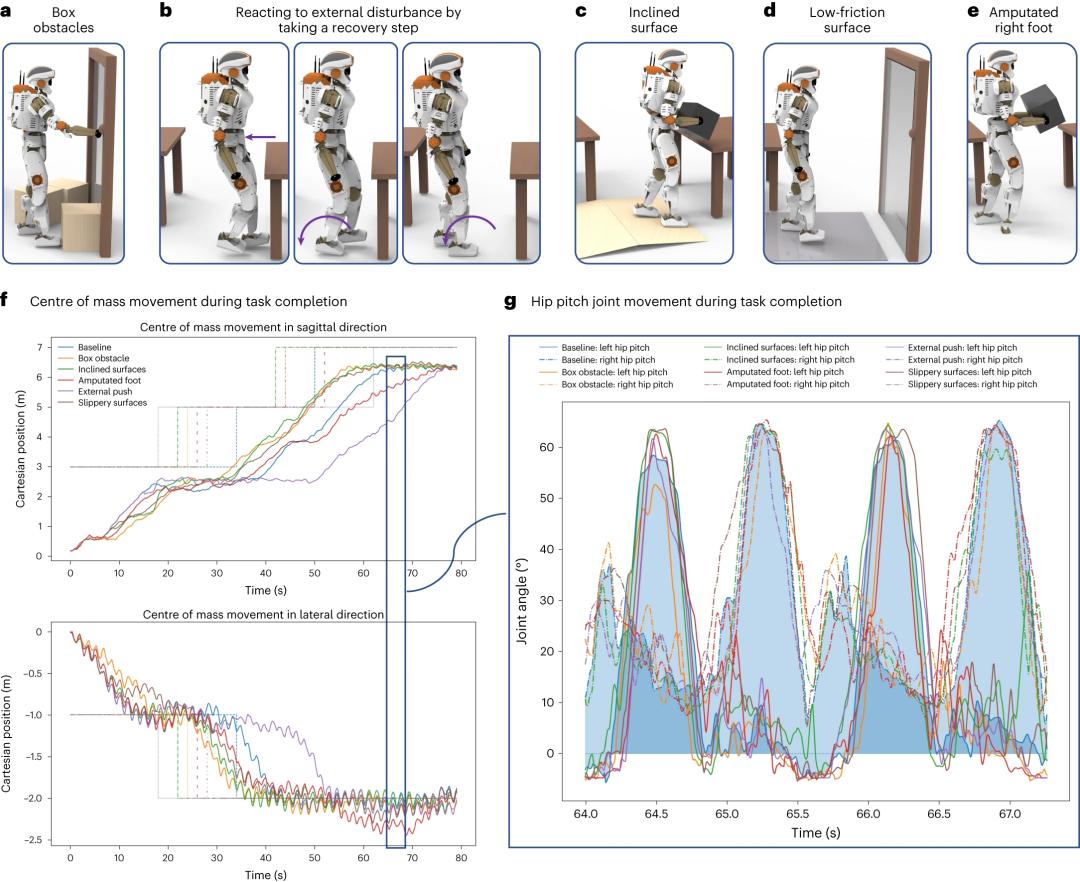
图2. 在扰动和环境变化时系统表现稳健
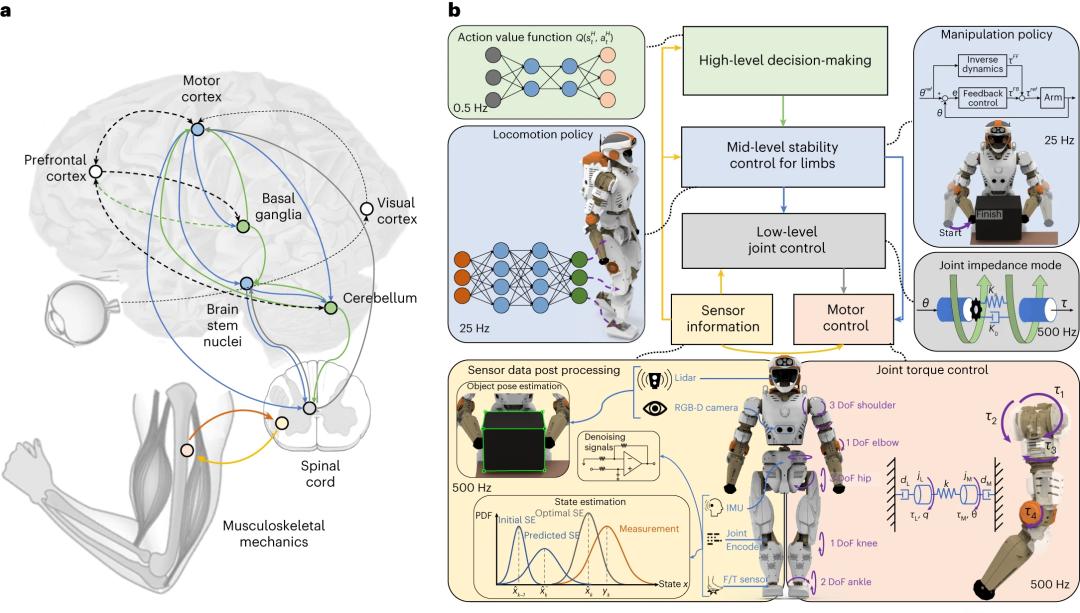
图3. 层级控制作为推理的算法实现
编译|梁金
原标题:《Nat. Machi. Intell.速递:面向自主机器人的层次生成建模》
本文为澎湃号作者或机构在澎湃新闻上传并发布,仅代表该作者或机构观点,不代表澎湃新闻的观点或立场,澎湃新闻仅提供信息发布平台。申请澎湃号请用电脑访问http://renzheng.thepaper.cn。



- 报料热线: 021-962866
- 报料邮箱: news@thepaper.cn
互联网新闻信息服务许可证:31120170006
增值电信业务经营许可证:沪B2-2017116
© 2014-2025 上海东方报业有限公司

