- +1
感知机、从错误中学习与迈向人工智能的一步 ——节选自《思维法则:探寻心智的数学理论》
感知机与赫布学习法则介绍。
作者:Tom Griffiths(汤姆・格里菲斯,普林斯顿大学心理学与计算机科学系亨利・卢斯信息技术、意识与文化讲席教授,普林斯顿人工智能实验室主任)2026-4-10
译者:zzllrr小乐(数学科普公众号)2026-4-13
逻辑的一大威力在于,它不仅提供了描述世界的方式,还提供了创造新思想的途径。从一组事实出发,遵循推理规则就可以推导出新的事实。空间与特征为心理学家提供了描述人类内心世界的新方式,但他们仍然缺少对心智状态如何随时间变化 —— 即对思维本身 —— 的清晰刻画。逻辑是计算思想的基础,并在图灵机中得到体现。将空间与特征用作心智表征,则需要提出一种全新的计算模型。
图灵机建立在对理想化数学家行为的分析之上:读取问题、执行计算、写下中间结果。但如果我们更仔细地观察这位数学家头脑内部发生的事情,就可以为另一种计算模型找到灵感。透过皮肉与骨骼,我们会发现阅读、计算与书写,全都是这位数学家大脑中神经元放电的结果。这些神经元以各种方式彼此连接,构成了神经网络。
与其试图复制这位数学家的思维与行为,何不尝试复制她的大脑?
1958年7月13日,一篇题为《电子 “大脑” 实现自我学习》的醒目文章,将人工神经网络介绍给了美国公众。文章开头写道:
美国海军上周展示了一台名为 感知机(Perceptron) 的电子计算机雏形,预计约一年后完工,它有望成为首个无需人类训练与控制、便能 “感知、识别并辨识周遭环境” 的无生命机械。在华盛顿演示该设备雏形的海军军官表示,他们不愿称其为机器,因为它太像一个 “没有生命的人”。
一个活生生的人,怎能不为此着迷?
模仿人类大脑构建电路的想法,早在1940年代就已出现。当时沃伦・麦卡洛克(Warren McCulloch)与沃尔特・皮茨(Walter Pitts)证明了神经元如何连接以实现布尔逻辑,并启发约翰・冯・诺依曼思考让计算机像大脑一样组织起来。神经网络在认知科学诞生之初便已登场:1956 年,纽厄尔(Newell)与西蒙(Simon)在麻省理工学院信息理论研讨会上发表报告后,紧接着出现了一篇关于在早期计算机 IBM 704 上实现神经元数学模型的论文。该论文的合著者之一洛伊丝・海布特(Lois Haibt),是此次研讨会上唯一展示研究成果的女性。她后来作为 FORTRAN 编程语言研发团队中唯一的女性,继续发挥着先驱作用。感知机的特别之处在于,它不只是由神经元构成的电路,它还能通过经验学习这些神经元应当如何彼此连接。
感知机的另一大特别之处,是其发明者弗兰克・罗森布拉特(Frank Rosenblatt)毫不避讳地宣扬它的潜力。他表示,感知机将是 “首个能像人类大脑一样思考的电子设备”。
遗憾的是,外界对他工作的回应,揭示出任何想要创造此类设备的人都将面临的重大挑战。
感知机登场
弗兰克・罗森布拉特是科班出身的心理学家,在康奈尔大学先后获得心理学学士与博士学位,之后成为布法罗市康奈尔航空实验室的研究心理学家。他的博士论文聚焦行为测试的统计分析,但在 1956 年的心理学论文中包含两项不寻常的内容:用数字计算机计算相关统计量的代码,以及他为同事设计的用于自动分析行为数据的电路图纸。尽管他最初的兴趣是理解人类心智,罗森布拉特却对打造更优秀的计算设备产生了浓厚兴趣。
在康奈尔航空实验室,他得以同时追求这两大兴趣,并启动了一项由美国海军资助的宏大项目。该项目名为PARA 计划,全称是 “感知与识别自动机计划”。他在项目首份报告中写道:“文中所述理念,源于笔者在生理心理学领域的独立研究,旨在构建一种可用于分析的大脑模拟模型。”
罗森布拉特想要打造一颗人工大脑。
具体而言,他想构建人工视觉系统 —— 大脑中处理经由眼睛输入信息的部分。他规划了一台配备人工视网膜的机器,视网膜由一组感知单元组成,这些单元会对图像对应区域的光线做出响应并激活。每个感知单元以不同方式连接至一组关联单元,关联单元汇总所有输入信号,若信号总和超过某一阈值便会激活。关联单元再依次连接至响应单元,响应单元执行相同的汇总与阈值判断操作。这些响应单元会对呈现在视网膜上的图像进行分类。例如,某个单元可以判断图形是正方形还是三角形,或是出现在左侧还是右侧。
图 1 简易感知机,仅含两个关联单元与一个响应单元。感知单元未显示,负责为关联单元提供输入。
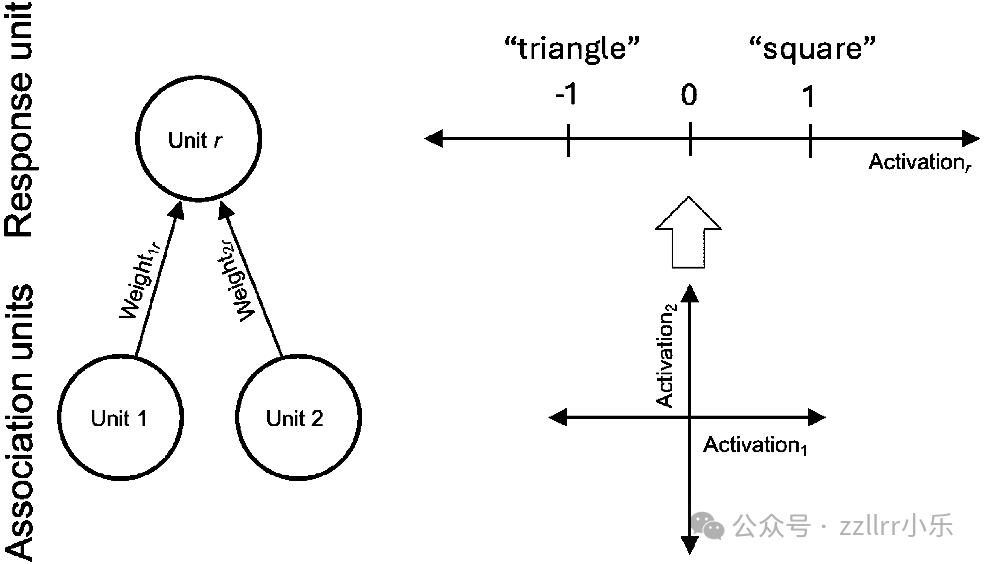
至关重要的是,关联单元与响应单元之间的连接允许拥有不同强度 —— 有些连接较弱,有些较强。这些连接的强度(即权重 weight)为实数,用于刻画输入与响应之间的不同关系:检测三角形可能需要与判断位置不同的权重,而这些权重需要通过学习获得。
简易感知机的工作流程如图 1 所示。信息从视网膜流向两个关联单元,再连接至单个响应单元(本例中用于将图像分类为正方形或三角形)。每个关联单元累加来自视网膜的信号,若总和高于阈值则输出激活值 1,否则为 0。该激活值(activation)沿连接传递至响应单元,并与对应权重相乘。响应单元累加所有关联单元的激活值与权重的乘积。若响应单元的输入大于 0,则输出 1,表示识别为正方形;否则输出 -1,表示识别为三角形。
我们可以用一点数学把这一切写得更清晰。首先,用 激活值₁表示第一个关联单元的激活值,激活值₂表示第二个关联单元的激活值。从第一个关联单元到响应单元的连接权重记为 权重₁ᵣ,第二个关联单元到响应单元的连接权重记为 权重₂ᵣ。
则响应单元 r 的输入可写为:
输入ᵣ = 激活值₁×权重₁ᵣ + 激活值₂×权重₂ᵣ
将结果与 0 比较,即可确定响应单元的激活值为 1 还是 - 1。
例如,若感知机接收到的输入使两个关联单元的激活值分别为 1 和 0,对应权重为 0.2 和 - 0.3,则响应单元的输入为:
1×0.2+0×(−0.3)=0.2
由于该数值大于 0,响应单元的激活值为 1—— 感知机判断当前存在正方形。
即便如此简单的神经网络,也是迈向空间计算的一步:神经网络可被视为将一个空间变换到另一个空间的方式。
在我们的简易感知机中,可以将关联单元视为定义一个空间。我们可以定义与 激活值₁和 激活值₂对应的坐标轴,并将关联单元的激活值表示为该空间中的一个点。每一个投射到感知机视网膜上的模式,都会转化为这个空间里的一个点。我们例子中激活值为 1 和 0 的模式,对应该空间中的点 (1, 0)。
感知机的响应则定义了另一个空间 —— 本例中是一维空间。响应单元的激活值 1 或 -1,决定了我们在该维度上的位置。在我们的例子中,点 (1, 0) 被映射为响应值 1。
感知机整体代表了这两个空间之间的映射:关联单元空间中的每个点,都会被映射到响应单元空间中的某个点,产生正向响应或不产生正向响应。神经网络的权重决定了该映射的具体形式 —— 即关联单元空间中哪些点最终会产生正向响应。例如,若例子中使用的权重不是 0.2 和 -0.3,而是 -0.1 和 0.4,则响应单元的输入为:
1×(−0.1)+0×0.4=−0.1
点 (1, 0) 将被映射为 -1。
罗森布拉特对感知机的最初描述中,已包含一组可解决简单分类问题的权重。但他的真正目标,是让感知机自主学习这些权重。为了理解这如何实现,他借鉴了当时神经科学的前沿思想。
放电与连接
1950年代,神经科学家刚刚开始探索大脑如何实现学习。罗森布拉特并未得到他所期望的明确答案,顶尖专家们大多只提出了学习如何运作的假说。其中最具颠覆性的假说,来自麦吉尔大学心理学家唐纳德・赫布(Donald Hebb)。
赫布对理解人类学习抱有浓厚兴趣。1904 年,他出生于加拿大新不伦瑞克省圣约翰市,父母均为医生(母亲是新斯科舍省第三位获得医学学位的女性)。他 8 岁前接受家庭教育,入学后第一年从二年级跳级到四年级,第二年升至六年级。可惜这种加速学习适得其反,导致他难以维持稳固的社交关系。他回忆道:“12 岁进入九年级时,我是班里年纪最小的,当时我更在乎同伴的尊重,而非解代数题、广泛课外阅读,或是拼写比全校师生都好。” 因无聊与缺乏动力,他十一年级挂科,对学校教育的价值留下了糟糕印象。
因此,顺利毕业并获得达尔豪西大学学士学位后,他竟成为家乡村庄小学校长,这或许令人意外。可惜任职并不顺利。当年晚些时候,省督学评估学校时,对这位新任校长说:“没关系,赫布,我第一年当校长也一塌糊涂。”
赫布离开学校,先后在麦田当卡车司机、在魁北克做体力劳动者,并开始阅读弗洛伊德著作。这段经历让他走上成为心理学家的道路:他在蒙特利尔一所小学教书的同时,在麦吉尔大学攻读研究生学位。
接下来的几年,赫布有机会从实践与理论两方面理解学习。在小学,他用 “允许做作业” 作为良好行为的奖励,用 “赶去户外玩耍” 惩罚调皮学生。在麦吉尔大学,他亲身体验巴甫洛夫条件反射实验,训练狗对特定线索产生唾液分泌反应。最终,他在硕士论文中提出理论,阐释心智如何在大脑中表征线索与结果之间的关联:
兴奋的神经元倾向于减少向不活跃神经元的放电,增加向任何活跃神经元的放电,从而形成通向该神经元的通路,无论两个神经元之间是否存在中间神经元。经过重复激活,这种倾向在神经通路形成中占据主导地位。
这个简单的想法 —— 神经元会与同时活跃的其他神经元形成更强连接 —— 让17年后的赫布声名远扬。
在此期间,赫布前往芝加哥攻读博士学位,导师卡尔・拉什利(Karl Lashley)转至哈佛后,他也随之转学;之后在蒙特利尔神经研究所研究人脑损伤对行为的影响,又赴佛罗里达研究黑猩猩大脑,最终回到麦吉尔大学担任教授。一路走来,他不断思考大脑如何表征概念,并得出结论:一个概念,就是一组相互反复激活的皮层神经元。但这样的神经元集群,究竟如何形成连接以实现反复激活?
1949 年,赫布在《行为的组织》一书中给出答案,并以更简洁的语言重述了他在硕士论文中首次提出的观点:
若细胞 A 的轴突足够接近细胞 B,并反复或持续参与激活细胞 B,那么两个细胞之一或两者会发生生长或代谢变化,使得细胞 A 激活细胞 B 的效率提升。
这就是学习理论。
神经元的轴突是细胞体通向与其他神经元连接的部分。因此,赫布理论的核心是:只要两个神经元距离足够近、能够相互影响,当它们同时激活(放电)时,两者之间的连接强度就会增强。神经科学家卡拉・沙茨(Carla Shatz)将其凝练为一句格言:一同放电的神经元,绑定在一起(neurons that fire together, wire together)。
尽管听起来复杂,这套对学习的解释却相当直观。暂时抛开神经元,仅从事件之间形成关联的角度思考,就完全说得通。我们将阳光与温暖关联,是因为它们反复持续共存;就像巴甫洛夫条件反射实验中的狗,闻到喜爱食物的气味会分泌唾液,是因为气味通常与进食同时出现。赫布将这种联想原则,延伸到了单个神经元层面。
赫布理论有两大重要优点。第一,它基本正确 —— 后续神经科学家深入研究学习背后的机制后发现,大脑中确实存在与赫布描述高度相似的过程。第二,对我们而言可能更重要的是,它可以被转化为清晰的数学表达式。
回到我们的简易感知机,赫布理论给出了一条可用于修改权重的规则:每个权重的增量Δ,等于它所连接的两个单元激活值的乘积。若两个单元均放电(激活值为 1),权重就会增加。若关联单元未放电(激活值为 0),权重则不变。若关联单元放电但响应单元输出-1,权重就会减小。如此一来,与正向响应同步激活的关联单元,权重最终会更高;与负向响应同步激活的关联单元,权重最终会更低(或为负值)。
我们再用一点数学把它写出来。用 激活值ᵣ 表示响应单元的激活值,则:
Δ权重ᵢᵣ=激活值ᵣ×激活值ᵢ
其中 激活值ᵢ与 权重ᵢ 分别为第 i 个关联单元的激活值与权重(i=1 对应第一个单元,i=2 对应第二个单元)。
在实际应用中,我们可能希望控制权重的修改幅度,这可以通过在公式中加入学习率(learning rate)实现。于是得到:
Δ权重ᵢᵣ = 学习率×激活值ᵣ×激活值ᵢ
这就是为纪念唐纳德・赫布而命名的赫布学习法则(Hebbian learning rule)。
赫布学习是捕捉数据中相关性的一种方式。由于两个单元激活值均为正时权重增加,一正一负时权重减小,权重会追踪这些单元所代表事物的共存程度。在我们的简易感知机中,赫布学习会捕捉关联单元激活与响应之间的相关性。如果我们知道响应单元应当输出的目标值,还可以使用修正版学习法则:
Δ权重ᵢᵣ=学习率×目标值ᵣ×激活值ᵢ
其中 目标值ᵣ 是响应单元应当输出的目标值。这会让权重捕捉关联单元激活与响应目标值之间的相关性。
赫布学习已被用于多种神经网络模型,尤其是研究神经元集群如何通过建立适当关联来存储与提取记忆的模型。但这并未让罗森布拉特满意 —— 他读研期间曾拜访过赫布的实验室。赫布成功描述了一种学习方式:巴甫洛夫条件反射,即两件事物因反复共存而相互关联。但罗森布拉特感兴趣的是另一种学习 ——从错误中学习。训练感知机的人能够判断它何时出错,而这些错误对于找到正确权重似乎尤为重要。
罗森布拉特需要提出一种全新的学习法则。
从错误中学习
罗森布拉特决定探索一个简单想法:仅当感知机出错时,才更新其权重。也就是说,仅当响应单元输出错误答案时,关联单元与响应单元之间的权重才会改变。例如,若响应单元用于判断是否存在正方形或三角形,错误答案包括:三角形出现时输出 1(应为 -1),或正方形出现时输出 -1(应为 1)。当错误发生时,所有激活的关联单元的权重会向正确答案方向调整:若目标应为 1 而响应单元输出 -1,则增加激活关联单元的权重,有助于将响应单元推向正确方向;同理,若目标应为 -1 而响应单元输出 1,则减小权重。
这条学习法则相当直观:发现自己错了,是学习的强大动力。如果你看到某物以为是猫,结果发现是狗,你可能会调整赋予猫狗不同特征的重要性,以便区分它们。反之,确认是猫,似乎不太会显著改变你对猫的表征。罗森布拉特的学习算法 ——感知机学习法则—— 捕捉到了错误的重要性:错误让我们关注形成响应所需的信息。
我们也可以用一些简单数学写出感知机学习法则,所用术语与赫布学习法则相同:
Δ权重ᵢᵣ = 学习率×(目标值ᵣ−激活值ᵣ)×激活值ᵢ
你可以验证,这条学习法则仅在感知机出错时才更新权重:若响应与目标一致,则 目标值ᵣ − 激活值ᵣ为 0。同时,权重会向正确方向修改:目标为 1、响应为 -1 时权重增加;目标为 -1、响应为 1 时权重减小。
对比感知机学习法则与赫布学习法则的公式,会发现一个有趣的事实。回想一下,赫布学习法则基于单元激活的相关性修改权重。感知机学习法则同样可以被视为基于相关性修改权重 —— 即响应误差(目标值ᵣ − 激活值ᵣ)与关联单元激活(激活值ᵢ)之间的相关性。
这是罗森布拉特的核心创新:学习并非由共存驱动,而是由单元对感知机犯错所承担的责任程度驱动。这样一来,学习可以更高效,专注于对减少错误最重要的修改。
凭借这条强大的学习法则,罗森布拉特证明了一个惊人的定理:感知机能够学会它所能表征的任何输入 — 输出关系。也就是说,如果存在一组权重能让感知机对一组样本输出正确响应,那么对这些样本足够多次地应用该学习法则,最终一定能得到产生正确响应的权重。
正是感知机的这一特性,让罗森布拉特对自己创造的 “人工大脑” 充满信心。他坚信,只要合理配置传感器到关联单元的连接,他的学习法则就能学会为任何有意义的任务生成恰当响应。1958年报道的演示,基于该学习法则的计算机模拟;此后,罗森布拉特与同事打造了实现感知机学习算法的物理设备 ——Mark I 感知机。它的人工视网膜由 20×20 个光电池组成(可处理最高 400 像素的图像),配有插线板用于配置传感器与关联单元之间的连接,还包含 512 个步进电机驱动电位器,用于调整关联单元与最多 8 个响应单元之间电路的电阻。
记者问罗森布拉特,感知机是否存在局限 —— 有什么是它做不到的?罗森布拉特摊开双手,直白回答:“爱、希望、绝望。简而言之,人类本性。我们自己都不懂人类性欲,凭什么指望机器能懂?” 然而,罗森布拉特的对手们认为,感知机面临着更根本的局限……
关于感知机的局限,以及这些局限最终如何被突破,详见新书《思维法则:探寻心智的数学理论》The Laws of Thought: The Quest for a Mathematical Theory of the Mind。本文为其节选,©2026 汤姆・格里菲斯,保留所有权利。
文章 DOI:10.1090/noti3333
原文参考文献
[1] Tom Griffiths. The Laws of Thought: The Quest for a Mathematical Theory of the Mind. Henry Holt and Company, 2026.
致谢
图 1 由汤姆・格里菲斯提供
参考资料
https://www.ams.org/journals/notices/202605/noti3333/noti3333.html
本文为澎湃号作者或机构在澎湃新闻上传并发布,仅代表该作者或机构观点,不代表澎湃新闻的观点或立场,澎湃新闻仅提供信息发布平台。申请澎湃号请用电脑访问http://renzheng.thepaper.cn。



- 报料热线: 021-962866
- 报料邮箱: news@thepaper.cn
互联网新闻信息服务许可证:31120170006
增值电信业务经营许可证:沪B2-2017116
© 2014-2026 上海东方报业有限公司

