- +1
智慧交通|一条与人方便的智慧化道路从何而来
新年伊始,英国政府就宣布,暂停全国的智慧高速公路计划,并表示,在运输部评估完安全之前,该项目将保持暂停。据英国《每日电讯报》调查,截至 2021年4月,有超过38人的交通事故死亡与智慧高速公路项目有关,调查认为,此类道路存在重大缺陷。

英国智慧高速的交通控制设备。
英国的智慧高速计划,主要的交通控制方式,是利用硬路肩缓解高峰时段拥堵,提升运输系统效率。这种交通控制方式也为中国国内一些智慧高速借鉴。这也是当下智慧高速较为常见的一种应用。
然而,对运输系统的主体,如车辆、司机等,业界可能并不那么了如指掌。因此,新应用难免会出问题。而自动驾驶车辆、网联车辆日渐成熟,在此压力下,道路部门不得不对这些新事物有所作为。于是,我们就会常看到道路部门亮出声光电设备,响应时代需求,做出道路智慧化的样子;也经常会看到不知确切用途的数据平台,用以展示道路智慧化“一切都在掌握之中”。

2022年,上海宝山。澎湃新闻记者 周平浪 图
一个个项目从立项到实施,钱花了不少。声光电设备也许能暂时应付上级的智慧化考核,但迷惑仍在,就是智慧化道路应该做些什么,收益在哪里。
欠缺的不是声光电,而是科技以人为本的思想。新技术下,道路智慧化提供什么服务,用路人想要什么,有什么样的特征,道路部门并不熟识。因此,给道路的新用路人画像,给自动驾驶车辆、网联车辆画像,也许才是第一步。
智慧化道路的目的
从已发布的各类道路智慧化文献里,鲜少见到对这些新用路人的特征和其需求的探讨,以及道路智慧化后的量化评价方法、指标。
运输系统工作是具体的民生,计算的每一步都需要有明确且实在的目的。譬如导航算完之后,司机可以知道走这条或那条路要花多长时间;又譬如前述的英国智慧高速,搭建的整个交通控制系统,其目的很清晰,高峰时段每辆车平均能省几分钟,拥堵时间会变多短。服务对象清晰,服务内容明确接地气,评价方法简单真实。
当前兴起的智慧化道路,其智慧化的目的,应该是在提升运输系统效率的大前提下,为老百姓提供省钱或省力的解决方案。如:提升道路路网的效率,减少运输系统的拥堵和安全问题;同时支撑国内自动驾驶车辆、网联车辆的产业发展,提升竞争力。
换句话说,当前智慧化道路的目的,一方面是改造现在的路网体系,提升其运输能力和为民服务的能力,另一方面要为自动驾驶车辆、网联车辆提供友好的产业发展环境。
本文试图解释,即当前或未来几年,真实存在或即将出现的自动驾驶、网联功能的车辆是怎么样的,它们对道路智慧化有什么需求。
自动驾驶车辆对智慧化道路的需求
笔者之前在“自动驾驶:交通规则的难题”中,说明了自动驾驶车辆对现实世界规则的理解方式,即自动驾驶车辆理解场景并按照规则行驶。这里提到的场景,是影响自动驾驶车辆特征的重要名词。道路或交通工程师所称的“场景”,汽车或软件工程师称作“设计运行域”(Operational Design Domain,ODD)。
设计运行域(ODD)是场景的算法描述方式。我们通常所说的“出口、交叉口、下坡、雨天路滑”等,人类司机往往会凭经验判断,或听到看到额外信息后,脑补完开车所需全部信息以做判断。但对自动驾驶车辆而言,机器需要有完整且严格的信息输入。每一处场景,都要用完整的设计运行域(ODD)解释给机器听,形成类似人类认知的场景。
美国国家公路交通安全管理局(NHTSA)推荐用六个类别来构建这套描述方法,分别是:物理设施、运行条件、对象、连通性、环境条件、分区。每个类别有更细的分类。NHTSA的方法是六维,早先也曾用三维描述:驾驶任务、行驶场合和环境。
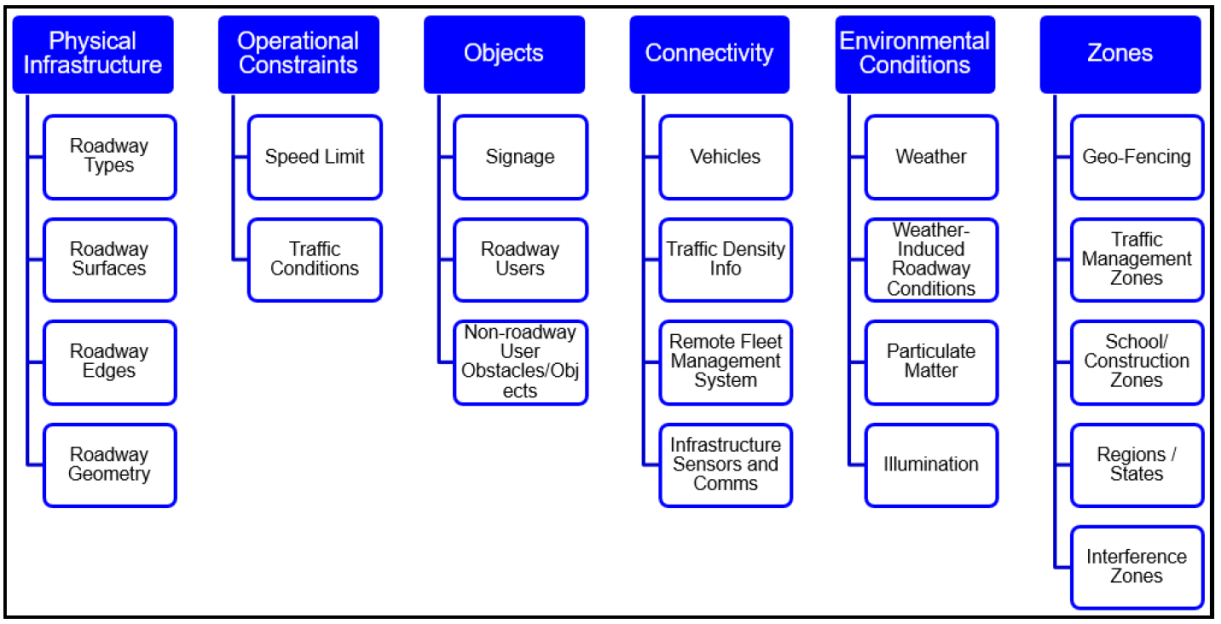
NHTSA推荐用六个类别来构建这套描述方法,分别是:物理设施、运行条件、对象、连通性、环境条件、分区。source: A Framework for Automated Driving System Testable Cases and Scenarios, NHTSA, 2018
自动驾驶依赖场景识别来进行策略规划和行动。因此,自动驾驶车辆作为新用路者,对道路智慧化的第一点需求是:智慧化道路应为自动驾驶车辆ODD识别提供支持,协助自动驾驶车辆确定当前设计运行域(ODD)。
智慧化道路的交通控制系统,应该搜集当前路段的场景数据,譬如当前路段是什么路,路面是沥青还是水泥,路面坑洞多不多,分布如何;交通管理的限制条件是什么,天气怎么样,路面是否湿滑,诸如此类信息等。因此,道路智慧化应该进行数字基础设施资产数据库的建设,将当地的实时有效资产信息通过通信平台传递给车辆。这些信息能协助自动驾驶车辆准确识别当前设计运行域,而对有人驾驶车辆而言,能提醒人类司机注意当前存在的风险。
关于智慧化道路建设的数字基础设施资产数据库,从业者也许会认为,就是建立数字孪生道路。如果以百万公里级的道路来考量,只有便宜且基层可维护的数字基础设施资产数据库,才可能成为智慧化道路的配置。贵了或者复杂了,即便建成也难以实时更新,最终沦为摆设。智慧化的投资,应遵循低成本且长期有效的原则,且应围绕用路者的需求。
2,自动驾驶车辆如果检测到交通事件,譬如前车刹车,或自己想变道,下一步就会如同人类司机一样,会有一系列驾驶任务(Dynamic Driving Task,DDT)要执行。当前的自动驾驶,通常也会用高级驾驶辅助系统(ADAS)的功能来描述,有时不区分这两者的区别。
自动驾驶车辆的驾驶任务,可总结为以下六类:
1)通过转向,控制车辆横向运动;
2)通过加减速,实现车辆纵向运动控制;
3)通过目标和事件检测、识别、分类和响应,监测和调整驾驶环境;
4)针对目标和事件的响应执行;
5)驾驶任务的整体策略规划;
6)通过灯光、信号和车辆姿态,增强驾驶行为的显著性(conspicuity)。
譬如,有停进一个停车位这样的驾驶任务。停进一个停车位的驾驶任务,一般持续十几秒到一两分钟。自动驾驶车辆需要了解停车场所的信息,并为其完整过程做明确的行为规划。这里就是上述第5条的含义。在开始执行停车这个驾驶任务的过程中,驾驶任务会细分为许多子任务,譬如控制转向和车速,逐步对准车位,这是第1、2条;监测车位附近的物体,是否有人经过,适时调整,这是第3、4条。如果车位上突然跑进来一只狗挡住车辆,傻乎乎呆着不动,那就按动喇叭打打跳灯,表达要停进来的目的,赶走傻狗,这是第6条。
无论开高速还是城市道路,自动驾驶车辆和人类司机的驾驶任务分析方法并无本质区别(驾驶任务的分析在人因理论中有详细解释,并仍在发展)。由于机器视觉系统在识别和逻辑判断能力上不如人类司机,智慧化道路需要在道路本身信息的显著性上需更清晰和准确。这多体现在道路的路面、交通标志、标线、信号设施的识别上,也体现在当地道路管理政策的逻辑合理性上。道路信息如标志、标线、信号灯的显著性,是当前道路智慧化的重头戏。
因此,智慧化道路,智慧应体现在规则易读、逻辑明显且严谨上,这是新用路人对道路智慧化的第二点需求,即提升道路规则的显著性。
随意设置的声光电设施和杆件,其带来的光线、色彩、明暗阴影,使道路上的信息传递变得复杂,无论对人类司机还是自动驾驶而言,都是有害的做法。

当前的自动驾驶,通常也会用高级驾驶辅助系统(ADAS)的功能来描述,有时,不区分这两者的区别。表中列出了自动驾驶已验证或推断的功能,以及其与高级驾驶辅助系统(ADAS)的应用对应关系。郭敏翻译。
笔者在“怎样才能制造一辆聪明的车”一文中,已说明了自动驾驶和高级驾驶辅助系统(ADAS)的关系。本文后续说明中,自动驾驶和高级驾驶辅助系统(ADAS)的含义不做区分。此外,越来越多的ADAS车辆同时也具备网联功能,本文也会混用网联车辆和装有网联功能的自动驾驶车辆的表述。
网联车辆对智慧化道路的需求
行业对网联车辆或具有网联功能的车辆的关注,关注其商业应用的发展要多于关注其安全能力。车联网或类似技术,从上世纪九十年代就开始应用在车辆上,一直不温不火。这可能并非是技术上的原因,更多是因为社会缺乏强有力的商业应用推动。而近十年的移动互联网商业模式的兴起,以及高级驾驶辅助系统(ADAS)的普及,已给网联车辆发展找到了路径。无疑,道路智慧化的一个方向,也会与移动互联网、网联车辆有关。
网联车辆可以产生大量数据。根据研究,平均每辆运行的汽车每天可产生30TB的数据。这些数据主要有四类:1. 车辆内部传感器产生的数据,如速度、方向、地理位置、总里程、空闲时间、燃料消耗等;2. 车辆周边交通情况,如是否拥堵,行人多不多等;3. 车辆途径的道路和交通设施情况,譬如红灯要多长时间、道路是否在施工等;4. 与车辆连接的外围设备数据,如车主连接的智能手机。
1. 网联车辆运行过程产生的海量数据,使车商和设备制造商可以开发新的业务模式,开辟新的收入来源。一些报告认为:到2030年,汽车行业7%的收入和14%的利润将来自数字服务;到2050年,车辆设备制造商50%的收入将来自与数据相关的服务。而到目前为止,网联车辆已探索了包括B2B、B2C在内的业务,较为成熟的业务有车队管理和汽车金融的应用。
2. 虽然网联车辆的发展主方向,是利用车辆的数据来精准管理提升效率,上述的车队管理、汽车金融都是如此,但从道路智慧化的角度来看,网联车辆也为道路效率提升提供了工具。
商业上盈利是推动网联车辆发展的主推手,道路智慧化也应遵循这样的思路。
此外,利用智慧道路的车路通信平台和交通管理系统,还可以在收费上形成精确、实时的交易,譬如在服务区加油、收费路段扣款、停车场缴费。网联车辆和道路的相互通信,也能协助道路通过设置路侧搜集设备搜集途径车辆的驾驶情况,譬如速度、加速、减速等情况,对这些信息的分析,可以帮助改进道路的安全性。
由于网联车辆或具有网联功能的车辆能实时收发信息,并能及时提醒车辆或司机,因此对控制中心及时分享合适准确的信息提出了要求。对跨运输方式的多式联运而言,网联车辆几乎是不同交通工具高效衔接的天然连接者,不过,前提仍是要有强大的中心系统,来完成信息的搜集和处理。
因此,网联车辆作为新用路者,对道路智慧化的第三点需求是:需要提升交通管理中心,并且改进运输系统和交通管理制度,以实现其跨平台、跨部门的大数据量搜集、计算能力,以及跨部门的协调能力。
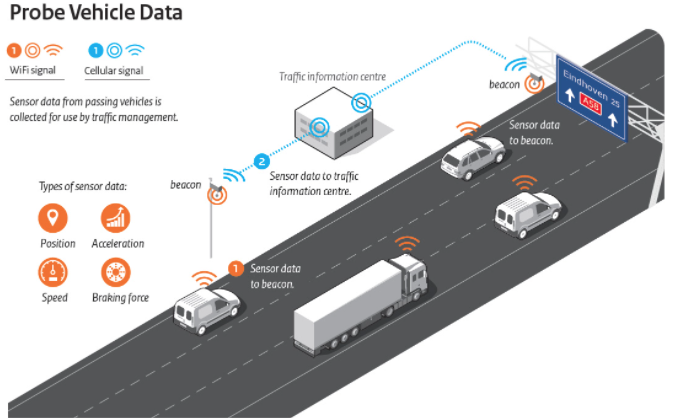
侦测车辆信息搜集(Probe Vehicle Data,PVD)的示意图。该图含义为,安装路侧设备,从路过车辆里读取该车的速度、加速、刹车等情况,也从周边环境中了解天气、道路路面干燥还是潮湿、路面滑不滑等情况。在探取这些信息同时,还增加了隐私保护,隐私保护有专门的协议和法律约束。
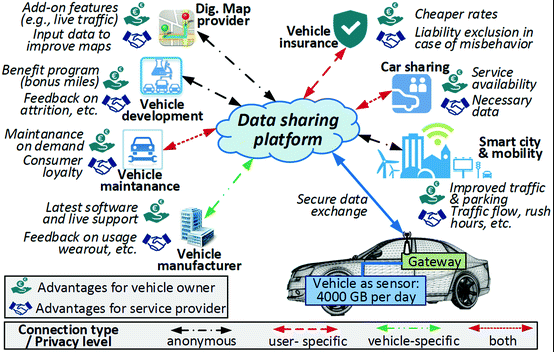
交通管理中心数据分享平台的数据整合。
道路智慧化要做些什么?
道路需要智慧化,以支持未来路网中人类司机和自动驾驶汽车的混合使用需求。这样的转变并非一蹴而就。当前的道路智慧化可认为是初级阶段,应针对未来十年的车辆和运输系统模式转变。以下,针对上述已确定的三点需求进行讨论。
1、随着网联车辆的运行模式和商业化会逐步成熟,道路智慧化需为其发展提供必要支撑。
由于网联车辆产生的数据,以及其与外部的交互能力,使道路管理平台既能从网联车辆获得道路的信息,也能将安全的、商业的信息,如施工作业区、灾害天气、交通信号配时、事故信息、拥堵情况等,及时推送给网联车辆,使车辆和道路整体能形成更紧密的运输系统来提供服务,促进安全、社会公共服务和商业的兴旺。
而这样的整合,要做许多工作。在制度上,打破不同运输方式及运输相关机构的壁垒,促进道路部门、公交地铁公司、医疗部门、保险公司、车企等数据的流通和共享;而在技术上,需要补更多功课,譬如跨部门数据的融合,跨部门运行的协调,以及使得成本可控等。
数据整合和流程再造,是网联车辆兴旺的前提,也是网联车辆需要披荆斩棘必须经历的过程。道路智慧化的难题,一不小心又回到了制度层面,人和制度的智慧化才是道路智慧化的中心议题,也是难点。
2、笔者在“怎样才能制造一辆聪明的车”一文中认为,自动驾驶车辆,在未来十年会以L3级为主的高级驾驶辅助系统(ADAS)形式出现,并与人类司机混合使用道路。
道路未来的需求,从目前为人类驾驶员而设计的状态,逐步演变为包括人类驾驶和L3级自动驾驶汽车混行的状态。混行会发生什么不同,道路智慧化应该做些什么,前述的对道路智慧化的第一点和第二点需求已说明。简单而言即为:一是对道路资产管理的新需求,二是针对机器视觉的交通控制设施改善。这些需求,同样是L4级自动驾驶车辆对道路智慧化的需求。
第一点的道路资产管理的新需求,与传统道路资产管理的变化主要集中在路面、桥梁、交通控制设施资产的管理需求。
由于机器驾驶的一致性,几乎所有自动驾驶车辆都会居中行驶,轮印位置几乎一致。自动驾驶车辆精准的对同一位置反复碾压,很快就会造成路面的车辙,缩短路面使用寿命。并且,自动驾驶车辆对路面的破损或缺陷现象,如坑洞、开裂、垃圾等,其判断和处理能力也远低于人类,对路面病害位置的反复碾压,会造成路面更大的损坏,反过来也易导致车辆失控。
道路智慧化需要针对自动驾驶车辆的新特性,引入新的资产管理策略和技术。一方面实时通过车路通信告知车辆,改变其行驶轨迹或相互间距,另一方面也要形成新的管理和维护策略,来延长道路寿命,降低道路资产的维护成本。
第二点针对机器视觉的交通控制设施改善,这与机器视觉系统的发现辨别能力要远弱于人类司机有关。
交通控制设施主要是标志、标线、信号灯,自动驾驶与交通控制设施的密切相关。人类司机通过视觉发现、跟踪交通控制设施,现有的设施足以完成对司机的信息传递。
ADAS的汽车前视摄像头是工业摄像头。与传统手机的消费级相机相比,汽车前视摄像头的分辨率较低,分辨能力并不强,需要物体有高对比度和更大的尺寸来增强识别准确性。譬如水泥路面的白色标线,由于对比度较差,机器视觉会难以辨别,3M公司与美国一些州对此有长达几年的研究,并对MUTCD提出了改造建议。而且,机器视觉还不具有与人类相同的场景联想能力,对图案、点、线的延申含义有时难以理解,譬如有时会不明白短虚线的含义,从而忽略标线存在。
新的交通控制设施手册MUTCD已为自动驾驶车辆和辅助驾驶系统提出了一些优化的标志、标线、信号灯建议。
以下仅以路面标线为例:
纵向的路面标线被认为是自动驾驶车辆的轨道,支持自动驾驶汽车部署的基础设施。ADAS的车辆检测和跟踪设备,以纵向路面标线为基础,提供车道偏离预警、车道保持辅助和车道对中辅助等ADAS功能。安装在挡风玻璃后面的前视摄像头与软件一起用于定位、跟踪标线,在标线被附近车辆遮挡时提供预测标线的功能。有时,标线被积雪覆盖,车辆传感器无法检测到道路标线,路面边缘的参照物或轮廓标可帮助ADS车辆进行精确的车辆定位。因此,在多雨水或冬季下雪的路段,应对路面边缘的诱导进行必要补充,便于识别。
标线对自动驾驶车辆和人类司机来讲,一直是至关重要的设施。然而,由于我国建设体制的资金分配方式是以造价为基础来分配,标线的造价很低,无论设计、施工、管理者和研究机构,从业者都难以获利,导致我国标线技术较为落后,尤其在研究和设计上。
自动驾驶最重要的基础设施,是标线,不是当前规范中推广的各类路侧设施、中心平台。就当前而言,投资千万级的RSU、边缘计算这些设备,远不如几块钱一米的标线重要。因此,当前中国需要推动提高包括标线在内的交通控制设施技术水平,从而提升全社会的道路安全。
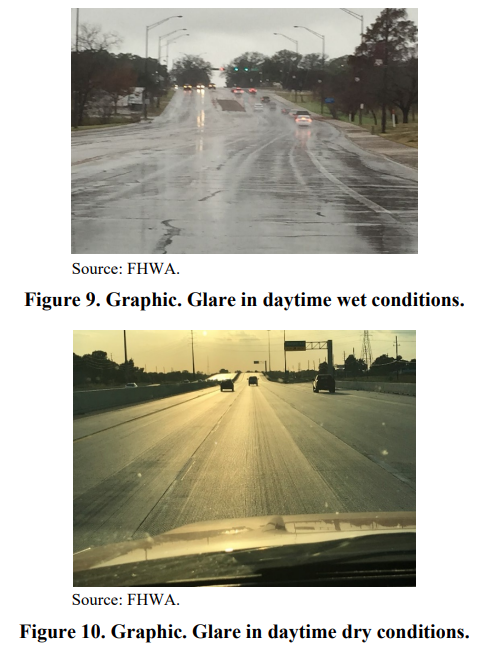
关于标线,长期以来,发达国家一直有大量研究。挪威研究表明,黄色标线比白色的更容易被发现。还有研究认为,6英寸宽的路面标线能提高机器视觉检测准确性,特别是当能见度条件不理想时,如在磨损标识、潮湿条件、低对比度、眩光等状况下。MUTCD的建议就是加宽路面纵向标线,提高对比度,如下图中Figure 11所示。
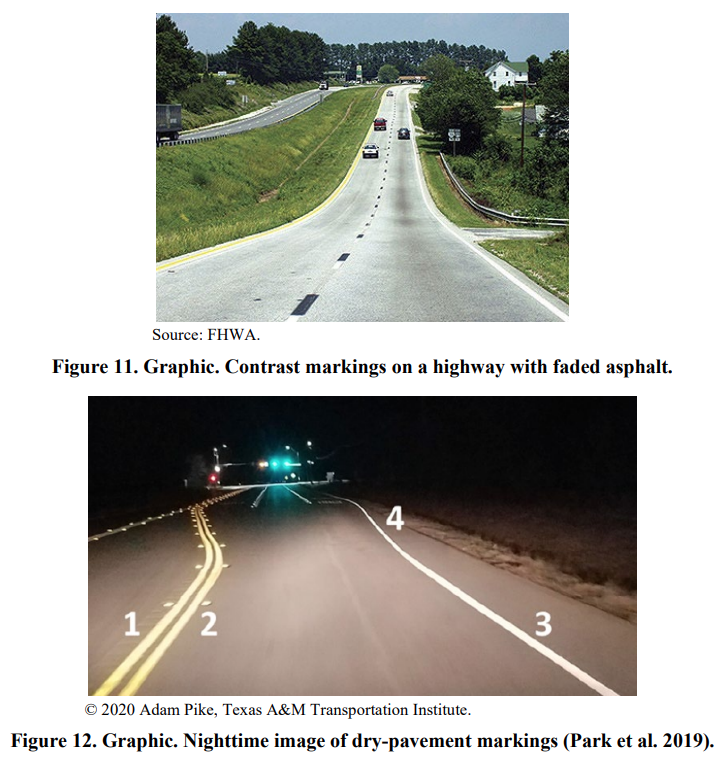
对标线来讲,机器视觉除了在识别上有外观显著性要求,还在标线的含义上,也有规则显著性要求。譬如在高速公路或快速路的出口匝道,直接式出口缺少车道加宽的标线延伸,机器视觉会误解为一条逐渐变宽的车道,然后车辆就会被定位在两条实线标线的中心,开错位置,经常会一直居中行驶闯入导流区。MUTCD建议对类似的标线进行必要的处理。
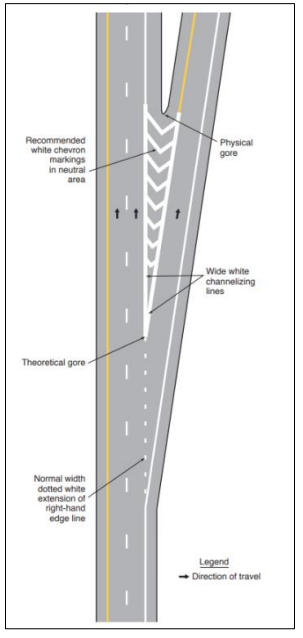
在高速公路或快速路的出口匝道,直接式出口缺少车道加宽的标线延伸,机器视觉会误解为一条逐渐变宽的车道,然后车辆就会被定位在两条标线的中心,而忽视中间的三角端延长线,经常会居中进入导流区。

作业区的标线应清晰并连续,防止机器视觉的误解。
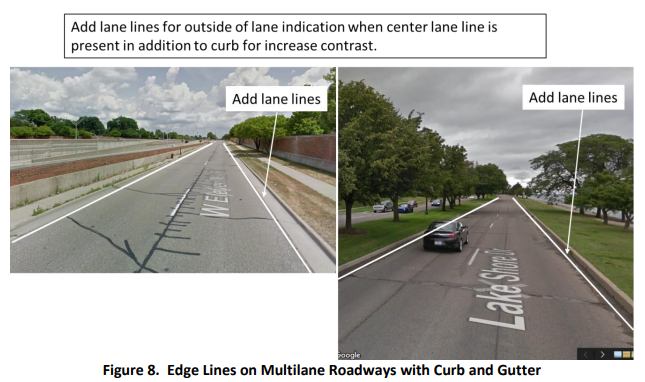
多车道公路的外侧,设置边缘性以增加机器易读性。
道路智慧化要做的功课还有很多。中国近几年大力投资发展自动驾驶和网联技术,这是产业发展的需求。突如其来的投资,并不代表技术突变,从全球汽车工业发展来看,都有历史传承。运输系统也一样,智慧化道路也是如此,有清晰的历史脉络。
现在全球运输系统升级,出现了种种新运输工具、新商业模式,如MaaS、自动驾驶车辆、网约车等。但其本质并非工程技术。技术在变,人心一直没变,对运输的需求也没有改变。
而当前的道路智慧化,经常追求大数据化、互联网化和声光电化,而忘记了打动人心才是运输系统发展的原动力。如何与人方便,或替用路人省钱,这些才应该是道路智慧化投资的原因。
(作者郭敏系杭州交通工程师)



- 报料热线: 021-962866
- 报料邮箱: news@thepaper.cn
互联网新闻信息服务许可证:31120170006
增值电信业务经营许可证:沪B2-2017116
© 2014-2026 上海东方报业有限公司

